 Click to enlarge Click to enlarge
|
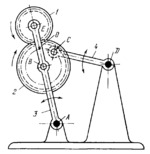
Description
Rocker arms 3 and 4 of four-link double-swing linkage ABCD turn about fixed axes A and D. Connecting rod BC is designed as toothed gear 2 which is connected by turning pairs B and C to rocker arms 3 and 4. Gear 2 meshes with gear 1 which rotates about axis E of rocker arm 3. When driving gear 1 rotates, driven rocker arms 3 and 4 oscillate about axes A and D with transmission ratios equal to i₁₃=ω₁/ω₃=A͞B/B͞O, and i₁₄=ω₁/ω₄=D͞C/C͞O, i₁₂=z₂/z₁ where ω₁, ω₃ and ω₄ are the angular velocities of gear 1 and rocker arms 3 and 4, A͞B and D͞C are the lengths of rocker arms 3 and 4, B͞O and C͞O are the variable distances from points B and C to point 0 of intersection of the axes of links 3 and 4, and z₁ and z₂ are the numbers of teeth of gears 1 and 2.
$2418$LrG,5L$
|





