 Click to enlarge Click to enlarge
|
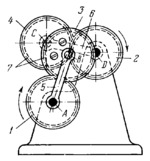
Description
Gear 1 rotates about fixed axis A and meshes with gear 3 which rotates about axis B. Rocker arm 5 turns about axis A and is connected by turning pair B to connecting rod 7 which consists of two gears, 3 and 4, rigidly attached together. Gear 4 meshes with gear 2 which rotates about fixed axis D. Rocker arm 6 turns about axis D and is connected by turning pair C to gear 4. Gears 1, 2, 3 and 4 have the same diameter and number of teeth. The angular velocities ω₁, ω₂, ω₅, ω₆ and ω₇ of links 1, 2, 5, 6 and 7 are related by the equations ω₇=2ω₅-ω₁=2ω₆-ω₂ where ω₅, ω₆ and ω₇ are determined by the given dimensions of the four-link double-swing linkage ABCD in which A͞B=D͞C=2r and B͞C=r where r is the pitch radius of gears 1, 2, 3 and 4.
$2420$LrG,5L$
|





