 Click to enlarge Click to enlarge
|
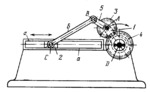
Description
Link 1 rotates about fixed axis D and is connected by turning pair A to planet gear 3 which meshes with fixed sun gear 4. Link 5 is rigidly attached to (or integral with) gear 3 and is connected by turning pair B to connecting rod 6 which, in turn, is connected by turning pair C to slider 2. Slider 2 moves along fixed guides a-a. When gear 3 rolls around gear 4, point B describes a prolate epicycloid of the pitch circle of gear 4 if A͞B>r₃, where r₃ is the pitch radius of gear 3. If A͞B=r₃, then point B describes an epicycloid and, finally, if A͞B<r₃, then point B describes a curtate epicycloid. The transmission ratio from link 1 to link 5, i₁₅=ω₁/ω₅, where ω₁ and ω₅ are the angular velocities of links 1 and 5, is equal to i₁₅=1/(1-i₃₄)=z₃/(z₃+z₄) where i₃₄=-z₄/z₃ and z₃ and z₄ are the numbers of teeth of gears 3 and 4. The required kind of motion of slider 2 is obtained by selecting the proper ratio between the numbers of teeth z₃ and z₄, and varying the length A͞B. At A͞B=r₃=r₄, where r₄ is the pitch radius of gear 4, point B describes a cardioid of a circle of radius r₄.
$2439$LrG,ML$
|





