 Click to enlarge Click to enlarge
|
Description
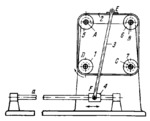
The lengths of the links comply with the condition: A͞B=B͞C=C͞D=D͞A. Figure ABCD is a square with two sides parallel to the motion of slider 4 and the other two perpendicular to this motion. Flexible link 2 runs over pulleys 1, 5, 6 and 7 of equal diameter. Connecting rod 3 is connected by turning pair E to flexible link 2 and by turning pair F to slider 4 which moves along fixed guide a. When point E travels along the horizontal straight portions of its path, link 3 has translational motion. When point E travels over the vertical straight portions, the motions of links 3 and 4 are equivalent to those of the connecting rod and slider in an ellipsograph mechanism. When point E travels along the circular portions of its path, the motions of links 3 and 4 are equivalent to those of the connecting rod and slider in an offset slider-crank mechanism in which the length of the crank equals the radius of the pulleys.
$1893$FL,ML$
|





