 Click to enlarge Click to enlarge
|
Description
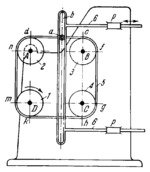
The lengths of the links comply with the conditions: r₁=r₂=r₃=r₄, where r₁, r₂, r₃ and r₄ are the radii of pulleys 1, 2, 3 and 4; and A͞B=B͞C=C͞D=D͞A. Figure ABCD is a square. Pulley 1 rotates about fixed axis D and, through flexible link 5, rotates pulleys 2, 3 and 4 about fixed axes A, B and C. Pin a of flexible link 5 slides along slot b of slider 6 which moves in fixed guides p-p. When pulley 1 rotates about axis D, slider 6 reciprocates in guides p-p. If line AB is parallel to the axes of guides p-p, line BC is parallel to the axis of slot b and pulley 1 rotates at constant angular velocity ω, then, when pin a travels along straight portions dc and hk of its path, slider 4 travels at constant velocity equal to v=ωr₁. When pin a travels along straight portions fg and mn of its path, slider 4 has two dwells in its extreme positions.
$1938$FL,D$
|





