 Click to enlarge Click to enlarge
|
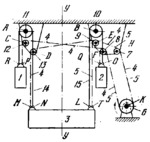
Description
Sheaves 10 and 11, of equal diameter, rotate about fixed axes B and A. Sheaves 9, 7, 8, 12 and 13 rotate about fixed axes E, H, F, C and D. Driving sheave 6 rotates about fixed axis K. Flexible link 4, connected to platform 3 at point M, runs over sheaves 13, 9, 7, 6, 8 and 12. The second end of flexible link 4 is connected to counterbalancing weight 1 at point P. Flexible link 5, connected to platform 3 at point T, runs over sheaves 9, 7, 6 and 8, and has its second end connected to counterbalancing weight 2 at point Q. Thus both flexible links, 4 and 5, run over common driving sheave 6. Flexible links 14 and 15, connected to platform 3 at points N and L, run over sheaves 11 and 10, and their other ends are connected to counterbalancing weights 1 and 2 at points R and 0. Platform 3 is raised or lowered by rotating sheave 6 about axis K. The platform has straight translational motion a long axis y-y.
$3140$SmC,LL$
|





