 Click to enlarge Click to enlarge
|
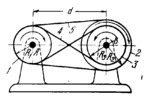
Description
Pulley 1 rotates about fixed axis A. Pulleys 2 and 3 rotate in- dependently of each other about fixed axis B. Open flexible link 5 runs over pulleys 1 and 2; crossed flexible link 4 runs over pulleys 1 and 3. The transmission ratios from pulley 1 to pulleys 2 and 3 are i₁₂=ω₁/ω₂=n₁/n₂=R₂/R₁ and i₁₃=ω₁/ω₃=n₁/n₃=-(R₃/R₁) where ω₁, ω₂, ω₃, n₁, n₂ and n₃ are the angular velocities and speeds (in rpm) of pulleys 1, 2 and 3, and R₁, R₂ and R₃ are the radii of pulleys 1, 2 and 3. Under the condition that R₂ >R₁, the lengths of flexible links 4 and 5 equal L₄=(π+2arcsin((R₁+R₃)/d))(R₁+R₃)+sqrt(d²+(R₁+R₃)²) and L₅=π(R₁+R₂)+2(R₂-R₁)arcsin((R₂-R₁)/d)+2*sqrt(d²-(R₂-R₁)²) where d is the distance between axes A and B.
$3495$SFL,ML$
|





