 Click to enlarge Click to enlarge
|
Description
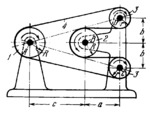
Pulleys 1 and 2 of radius R rotate about fixed axes A and B. Pulleys 3 of radius r rotate about fixed axes C and D. Flexible link 4 runs over pulleys 1, 2 and 3. The transmission ratio from pulley 1 to pulley 2 is i₁₂=ω₁/ω₂=n₁/n₂=-1 where ω₁, ω₂, n₁ and n₂ are the angular velocities and speeds (in rpm) of pulleys 1 and 2. Thus pulleys 1 and 2 rotate in opposite directions. The length of link 4 is L=2π(R+r)+2[(R-r)arcsin((R-r)/d)+sqrt(d²-(R-r)²)+a] where d is the distance from axis A to axis C or D and equals d=sqrt((a+c)²+b²).
$3503$SFL,ML$
|





