 Click to enlarge Click to enlarge
|
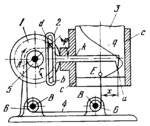
Description
Link 1 rotates about fixed axis A and carries pin d which slides along straight slot b of link 2. Link 2 reciprocates in fixed guide k. Rigidly attached to link 1 is pulley 5 to which one end of flexible link 4 is secured. Link 4 runs over identical pulleys 6 which rotate about fixed axes B. The other end of link 4 is attached at point E to slide 3 which reciprocates along fixed guides c-c. When link 1 rotates, point a of slotted link 2 describes cosinusoid q on slide 3. The equation of the cosinusoid is x=r*cos(φ) where r is the distance from the centre of pin d to axis A and φ is the angle of rotation of link 1.
$3563$CFL,Ge$
|





