 Click to enlarge Click to enlarge
|
Description
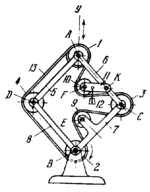
Four identical pulleys 1, 2, 3 and 4 rotate about axes A, B, C and D, and are connected by turning pairs to links 5, 6, 7 and 8 whose lengths comply with the condition: A͞C=C͞B=B͞D=D͞A, i.e. figure ACBD is a rhombus linkage. Two identical pulleys 9 and 10 rotate about axes E and F of link 7 and of link 11 which carries weight 12 and can turn freely about axis K of link 6. Endless flexible link 13 runs over pulleys 1, 2, 3, 4, 9 and 10. When pulley 2 rotates about fixed axis B, all the other pulleys rotate about their axes, and axis A of pulley 1 can travel with any kind of motion along axis y. By means of weight 12, pulley 10 maintains the required tension of link 13.
$3571$CFL,DF$
|





