





|
|
|||||||
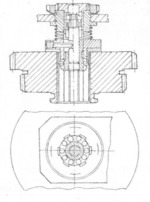
Mechanical hand gripping by inner surfaces and releasing the object by pressing |
|||||||
|---|---|---|---|---|---|---|---|
 Click to enlarge Click to enlarge
|
Description
The mechanical hand grips and releases flanges oriented by centering on inner cylindrical surfaces and positioning by flat end face by pressing the hand on the workpiece. |
||||||
| Linked items | |||||||
|
|||||||
| Permanent links | |||||||
|
|
|||||||
| Data provider | |||||||
|
|
|||||||