 Click to enlarge Click to enlarge
|
Description
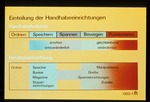
Die Handhabefunktionen Ordnen, Speichern, Spannen, Bewegen und Positionieren von Werkstücken und teils auch von Werkzeugen bedingen entsprechende Mittel. Dabei ist zu unterscheiden, ob diese Funktionen ortsfest oder ortsveränderlich, in Form und zeitlichem Ablauf gleichbleibend oder veränderlich nach einem Programm ablaufen.
Für programmiert ablaufende Bewegungen und Positionierungen sind die Manipulatoren in den Vordergrund getreten. Sie haben 2 bis 6 Beweglichkeiten oder Bewegungsachsen und ermöglichen, ein Werkstück auf bestimmtem, gewünschtem Wege von einer Position in ihrem Arbeitsraum in eine andere Position zu bringen, z. B. aus einer Bereitstellungsposition auf einer Palette in eine Spannstation.
Attributes
|





