 Click to enlarge Click to enlarge
|
Description
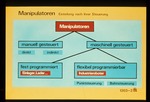
Manipulatoren sind Arbeitsmaschinen zum Handhaben von Werkstücken und/oder Werkzeugen. Der Begriff leitet sich von manus (lateinisch) die Hand ab. Manipulatoren können nach ihrer Bewegungssteuerung eingeteilt werden: Manuell gesteuerte Manipulatoren sind gewissermaßen auch Hallenkrane, Schmiedemanipulatoren, Bagger, Lader; sie werden indirekt über Schalthebel oder -knöpfe in Bewegung gesetzt. Direkt manuell gesteuert ist der Manipulator, wenn das Werkzeug oder der Greifer von Hand angefasst und bewegt wird wie beim Exoskeleton oder bei der teach-in-Programmierung.
Maschinell gesteuert sind z. B. Einleger und Lader; sie sind fest programmiert und haben meist einfache Bewegungsformen und -abläufe. Die Industrieroboter sind flexibel programmierbare Manipulatoren für Handhabeoperationen in der industriellen Produktion. Ihr Führungsgetriebe (Arm) weist einen Freiheitsgrad von 3 bis 6 auf, d. h., es hat ebenso viele Bewegungsachsen (s. HPR 585).
Attributes
|





