 Click to enlarge Click to enlarge
|
Description
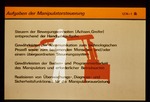
Dargestellt sind Softwarekomponenten einer Industrierobotersteuerung auf Mikrorechnerbasis (IRS 600). Sie bestehen steuerungsbezogen aus dem Steuerprogrammsystem als Software-Betriebssystem der Steuerung und aus dem Anwenderprogrammsystem (die als Handhabungsprogramme bezeichneten Arbeitsprogramme für den Industrieroboter). Das Steuerprogrammsystem ist in der Regel auf EPROM (residente Programme) gespeichert, es beinhaltet die softwaremäßig realisierten Funktionen der Steuerung in allen Details. Programme sind nach den Hauptfunktionen (Dia) benannt, z. B. verwirklicht der Positioniermodul (vgl. HR 1274/20) die Bewegungssteuerung der Roboterachsen.
Die Handhabungsprogramme werden z. B. mittels Teach-in über ein Tableau eingegeben; die hierzu notwendigen Funktionen der Steuerung realisiert der Programmiermodul.
Attributes
|





