 Click to enlarge Click to enlarge
|
Description
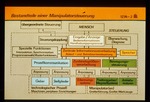
Die grundsätzlichen funktionellen Bestandteile einer Manipulatorsteuerung gliedern sich in die in jeder Steuerung vorhandenen (Bewegungssteuerung, Prozesskommunikation, Programmspeicher, Eingabe/Anzeige, zentrale Informationsverarbeitung) und in die zusätzlich möglichen Bestandteile (Überwachung und Diagnose, Steuerungskopplung, spezielle Funktionen, Zustandsgrößenverarbeitung). De nach Steuerungsart (vgl. HR 1274/3), Steuerungsumfang, Steuerungs-Hilfsenergie, Bauelementebasis und Steuerungskomfort existieren verschiedenartige, vielfältige technische Realisierungen. Der Manipulator als Automatisierungsmittel für technologische Prozesse erfordert die steuerungsseitige Kommunikation mit bzw. zwischen den gesteuerten und ungesteuerten Maschinen und Geräten dieses Prozesses. Hierzu dient vorzugsweise die Prozesskommunikation.
Attributes
|





