 Click to enlarge Click to enlarge
|
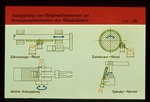
Description
Die Ankopplung von WMS an die Bewegungseinheiten kann auf unterschiedliche Weise realisiert sein, wozu im Dia 4 Beispiele angegeben sind. Sie wird wesentlich von den konstruktiven Erfordernissen und Möglichkeiten, aber auch von der geforderten Weg- bzw. Winkelauflösung bestimmt. Allgemeine Forderungen sind gute Zugänglichkeit für das WMS, Spiel- und Losefreiheit, Verhinderung des Eindringens von Fremdstoffen (z. B. Öl), hoher Getriebewirkungsgrad. Übertragungsgetriebe müssen i. allg. Präzisionsforderungen entsprechen.
Attributes
|





