Structure du mécanisme |
| Fonction |
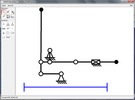
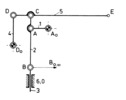
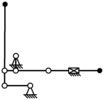
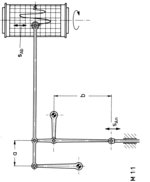
Bild 5.1/12 zeigt das kinematische Schema des Übertragungsgestänges. Die Glieder 1, 2, 3 und 6;0 bilden eine Schubkurbel. An deren Koppelpunkt C ist das Glied 5 angelenkt, das außerdem im Gelenk D durch das im Gestell gelagerte Glied 4 geführt wird.
- Übertragungsgetriebe zur Umwandlung einer Schubbewegung in eine maßstäblich vergrößerte, geradlinige Positionierbewegung des Koppelpunktes
- Ebenes Stephenson-3-Getriebe
Zusätzliche Informationen sind in Getriebetechnik in Beispielen zu finden. |
| taille |
Plan |
| Nombre de liaison |
6 |
| Mouvements input |
Translation rectiligne |
| Mouvement de sortie |
Position |
| Degré de liberté |
1 |
| Nombre d'entrées |
1 |
| Nombre de pièces intermédiaires |
1 |
| Model révolution |
Non |
| Capacité rotative du solide d'entrée |
Non |
| Position relative de la pièce intermédiaire par rapport à la sortie |
Parallèle |
| |
Fonction de guidage |
| Direction de la trajectoire |
Direction identique |
| Orientation du solide de sortie |
Général |
| taille |
Plan |
| Référence d'entrée |
Oui |
| Evolution de l'orientation selon le solide de sortie |
Rotatif |
| |
Fonction de transfert |
| Mouvement de sortie |
Grande amplitude |
| |
Application |
| Domaine d'application |
Other fields |
| Exemples d'utilisation |
Registriergerät |
| |






 Animations
Animations CAX files
CAX files Images
Images

 Start interactive animation
Start interactive animation