Structure of mechanism |
| Function |
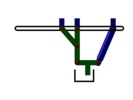
The motion device described in the patent relates to a machine for multiaxial movement of a tool or a part. The machine is based on a linkage with 9 links and 10 joints, which is driven by three sliding elements and a cylinder. The degree of freedom of the mechanism is F = 4. |
| Dimension of mechanism |
planar |
| Number of links |
9 |
| Drive movement |
Rectilinear translation |
| Output movement |
Position |
| Degree of freedom |
4 |
| Fundamental mechanism |
 Link containing mechanism Link containing mechanism |
| Number of inputs |
4 |
| Number of followers |
1 |
| Revolution ability |
no |
| Revolution ability of input link |
no |
| Relative position between drive and output |
Other |
| |
Guidance function |
| Direction of the path |
other |
| Orientation of output link |
general |
| Trace of a dedicated point on follower |
 Open trace Open trace |
| Dimension of mechanism |
planar |
| Input reference |
no |
| Progress of orientation respecting output link |
miscellaneous |
| |
Application |
| Application area |
Production |
| |







 Animations
Animations Videos
Videos Images
Images