Struttura del meccanismo |
| Funzione |
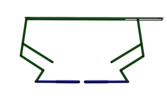
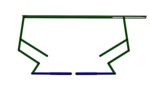
The motion device described in the patent relates to a hospital bed for variably positioning a patient. The hospital bed is based on a linkage with 13 links and 17 joints, which is driven by two cylinders. The degree of freedom of the mechanism is F = 2. |
| Dimensione del meccanismo |
planare |
| Numero di membri |
13 |
| Movimento del movente |
Traslazione rettilinea |
| Moto del cedente |
Moto del telaio |
| Gradi di libertà |
2 |
| Numero di membri moventi |
2 |
| Numero di membri cedenti |
1 |
| Capacità di rotazione |
no |
| Capacità di rotazione del membro movente |
no |
| Posizione relativa tra movente e cedente |
intersezione |
| |
Funzione di movente |
| Direzione della traiettoria |
direzione opposta |
| Orientazione del membro cedente |
simmetrico |
| Dimensione del meccanismo |
planare |
| Riferimento del movente |
si |
| Verso di orientazione del membro cedente |
oscillazione in un intervallo non noto |
| |
Applicazione |
| Area di applicazione |
Medical Science |
| |






 Animations
Animations Videos
Videos Images
Images