  | Ansicht vergrößern |
|
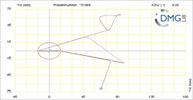
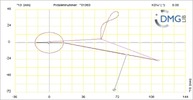
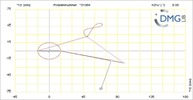
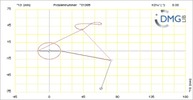
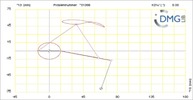
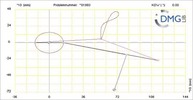
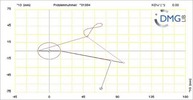
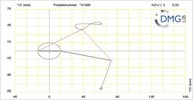
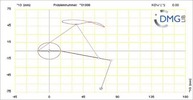
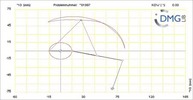
Getriebestruktur |
| Funktion |
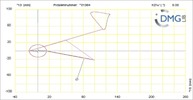
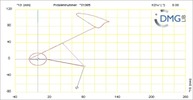
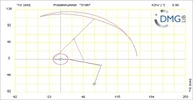
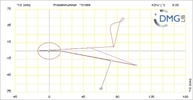
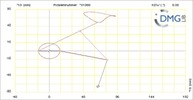
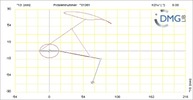
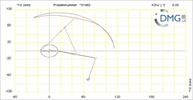
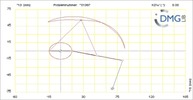
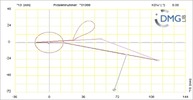
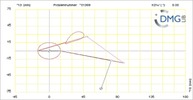
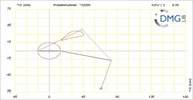
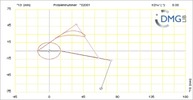
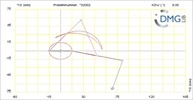
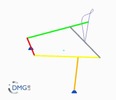
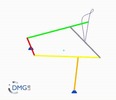
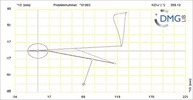
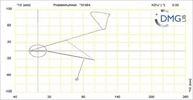
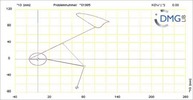
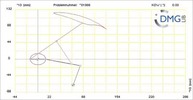
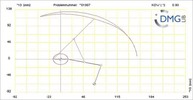
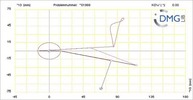
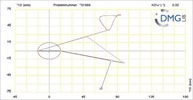
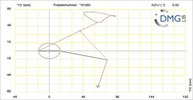
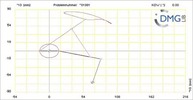
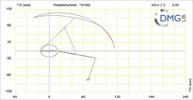
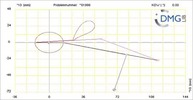
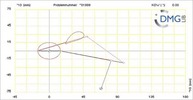
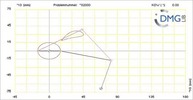
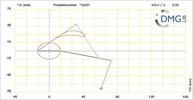
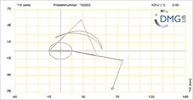
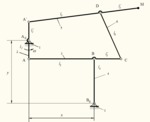
Das Getriebe enthält ein Viergelenk parallel geschaltet mit einer RRR kinematische Kette. Die nachgeschalter RRR kinematische Kette ist mit der Kurbel und der Koppel des Viergelenkes durch Drehgelenke verbunden. Durch Änderung der geometrischen Abmessungen des Getriebes beschreibt der Koppelpunkt M eine Reihe von Koppelkurven. |
| Kommentar |
Geometrische Größen:
Variante 1: x = 686 mm, y = 686 mm, l2 = 150 mm, l2´= 150 mm, l3 = 690 mm, l3´ = 345 mm, l4 = 530 mm, l5 = 700 mm, l5´= 700 mm, l6 = 680 mm
Variante 2: x = 686 mm, y = 686 mm, l2 = 150 mm, l2´= 150 mm, l3 = 690 mm, l3´ = 170 mm, l4 = 530 mm, l5 = 700 mm, l5´= 700 mm, l6 = 680 mm
Variante 3: x = 686 mm, y = 686 mm, l2 = 150 mm, l2´= 150 mm, l3 = 690 mm, l3´ = 0 mm, l4 = 530 mm, l5 = 700 mm, l5´= 700 mm, l6 = 680 mm
Variante 4: x = 686 mm, y = 686 mm, l2 = 150 mm, l2´= 150 mm, l3 = 690 mm, l3´ = -170 mm, l4 = 530 mm, l5 = 700 mm, l5´= 700 mm, l6 = 680 mm
Variante 5: x = 686 mm, y = 686 mm, l2 = 150 mm, l2´= 150 mm, l3 = 690 mm, l3´ = -345 mm, l4 = 530 mm, l5 = 700 mm, l5´= 700 mm, l6 = 680 mm
Variante 6: x = 686 mm, y = 686 mm, l2 = 150 mm, l2´= 150 mm, l3 = 690 mm, l3´ = 345 mm, l4 = 530 mm, l5 = 700 mm, l5´= 300 mm, l6 = 680 mm
Variante 7: x = 686 mm, y = 686 mm, l2 = 150 mm, l2´= 150 mm, l3 = 690 mm, l3´ = 170 mm, l4 = 530 mm, l5 = 700 mm, l5´= 300 mm, l6 = 680 mm
Variante 8: x = 686 mm, y = 686 mm, l2 = 150 mm, l2´= 150 mm, l3 = 690 mm, l3´ = 0 mm, l4 = 530 mm, l5 = 700 mm, l5´= 300 mm, l6 = 680 mm
Variante 9: x = 686 mm, y = 686 mm, l2 = 150 mm, l2´= 150 mm, l3 = 690 mm, l3´ = -170 mm, l4 = 530 mm, l5 = 700 mm, l5´= 300 mm, l6 = 680 mm
Variante 10: x = 686 mm, y = 686 mm, l2 = 150 mm, l2´= 150 mm, l3 = 690 mm, l3´ = -345 mm, l4 = 530 mm, l5 = 700 mm, l5´= 300 mm, l6 = 680 mm
Variante 11: x = 686 mm, y = 686 mm, l2 = 150 mm, l2´= 150 mm, l3 = 690 mm, l3´ = 345 mm, l4 = 530 mm, l5 = 700 mm, l5´= 0 mm, l6 = 680 mm
Variante 12: x = 686 mm, y = 686 mm, l2 = 150 mm, l2´= 150 mm, l3 = 690 mm, l3´ = 170 mm, l4 = 530 mm, l5 = 700 mm, l5´= 0 mm, l6 = 680 mm
Variante 13: x = 686 mm, y = 686 mm, l2 = 150 mm, l2´= 150 mm, l3 = 690 mm, l3´ = 0 mm, l4 = 530 mm, l5 = 700 mm, l5´= 0 mm, l6 = 680 mm
Variante 14: x = 686 mm, y = 686 mm, l2 = 150 mm, l2´= 150 mm, l3 = 690 mm, l3´ = -170 mm, l4 = 530 mm, l5 = 700 mm, l5´= 0 mm, l6 = 680 mm
Variante 15: x = 686 mm, y = 686 mm, l2 = 150 mm, l2´= 150 mm, l3 = 690 mm, l3´ = -345 mm, l4 = 530 mm, l5 = 700 mm, l5´= 0 mm, l6 = 680 mm
Variante 16: x = 686 mm, y = 686 mm, l2 = 150 mm, l2´= 150 mm, l3 = 690 mm, l3´ = 345 mm, l4 = 530 mm, l5 = 700 mm, l5´= -300 mm, l6 = 680 mm
Variante 17: x = 686 mm, y = 686 mm, l2 = 150 mm, l2´= 150 mm, l3 = 690 mm, l3´ = 170 mm, l4 = 530 mm, l5 = 700 mm, l5´= -300 mm, l6 = 680 mm
Variante 18: x = 686 mm, y = 686 mm, l2 = 150 mm, l2´= 150 mm, l3 = 690 mm, l3´ = 0 mm, l4 = 530 mm, l5 = 700 mm, l5´= -300 mm, l6 = 680 mm
Variante 19: x = 686 mm, y = 686 mm, l2 = 150 mm, l2´= 150 mm, l3 = 690 mm, l3´ = -170 mm, l4 = 530 mm, l5 = 700 mm, l5´= -300 mm, l6 = 680 mm
Variante 20: x = 686 mm, y = 686 mm, l2 = 150 mm, l2´= 150 mm, l3 = 690 mm, l3´ = -345 mm, l4 = 530 mm, l5 = 700 mm, l5´= -300 mm, l6 = 680 mm. |
| Getriebedimension |
eben |
| Anzahl Getriebeglieder |
6 |
| Antriebsbewegung |
Drehen |
| Abtriebsbewegung |
Dreh-Schieben |
| Laufgrad |
1 |
| Enthaltene Grundgetriebe |
 Koppelgetriebe Koppelgetriebe |
| Anzahl Antriebsglieder |
1 |
| Anzahl Abtriebsglieder |
1 |
| Umlauffähigkeit |
ja |
| Umlauffähigkeit Antrieb |
ja |
| Relativlage von An- und Abtriebsachse |
parallel |
| |
|






 Animationen
Animationen CAX-Dateien
CAX-Dateien Videos
Videos Bilder
Bilder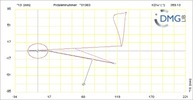
 Interaktive Animation starten
Interaktive Animation starten