Structure of mechanism |
| Function |
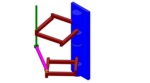
Version Anglaise: The inventive robot comprises two levels (I), (II). Each level consists of two actuators (1), (2) which are connected to
a support (3). One end of each horizontally-positioned arm (4), (8) is connected to the actuator (1), (2) respectively and one end of each arms (5), (9) is connected to the free end of the arm (4), (8) respectively. The other ends of arms (5), (9) are connected to each other at point (6) which moves in a horizontal plane with two degrees of freedom. The level (I) point (6) and the level (II) point (6) are connected by means of a coupling mechanism (7) one of mentioned connections comprising a rotary joint and the other comprising a cylindrical joint. According to the invention, a tool (10) is mounted at the point (6) comprising the cylindrical joint and mentioned tool can move with four degrees of freedom, namely three translational movements and one rotational movement along a vertical axis. |
| Comment |
Author : Pommarin TANGSITTISIN
Modified by : Khaled-Assad ARROUK
IFMA (French Institute for Advanced Mechanics) - http://www.ifma.fr
Clermont-Ferrand, France
This model was generated to explain a certain patent in more detail.
The model and all attached items were made within this context. |
| Dimension of mechanism |
spatial |
| Number of links |
12 |
| Drive movement |
Rotation superposed by rectilinear translation |
| Degree of freedom |
4 |
| Fundamental mechanism |
 Link containing mechanism Link containing mechanism |
| Number of inputs |
4 |
| Number of followers |
7 |
| Revolution ability of input link |
yes |
| |
Application |
| Application area |
Production and Various fields |
| Examples of application |
The robot can be used in packaging process. For example, the lower arms of this robot can rotate to the right position where a product is in and then the upper arms rotate to push the coupling bar (7) to move down to pick up the product. Placing the product is functioned by the same concept. |
| |






 Animations
Animations CAX files
CAX files Documents
Documents Videos
Videos Images
Images









