  | Ansicht vergrößern |
|
Getriebestruktur |
| Funktion |
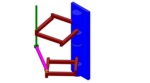
Version Anglaise: The inventive robot comprises two levels (I), (II). Each level consists of two actuators (1), (2) which are connected to
a support (3). One end of each horizontally-positioned arm (4), (8) is connected to the actuator (1), (2) respectively and one end of each arms (5), (9) is connected to the free end of the arm (4), (8) respectively. The other ends of arms (5), (9) are connected to each other at point (6) which moves in a horizontal plane with two degrees of freedom. The level (I) point (6) and the level (II) point (6) are connected by means of a coupling mechanism (7) one of mentioned connections comprising a rotary joint and the other comprising a cylindrical joint. According to the invention, a tool (10) is mounted at the point (6) comprising the cylindrical joint and mentioned tool can move with four degrees of freedom, namely three translational movements and one rotational movement along a vertical axis. |
| Kommentar |
Dieses Modell wurde angefertigt, um ein bestimmtes Patent detailierter zu erklären.
Das Modell sowie alle zugehörigen Items wurden in diesem Kontext erstellt. |
| Getriebedimension |
räumlich |
| Anzahl Getriebeglieder |
12 |
| Antriebsbewegung |
Dreh-Schieben |
| Laufgrad |
4 |
| Enthaltene Grundgetriebe |
 Koppelgetriebe Koppelgetriebe |
| Anzahl Antriebsglieder |
4 |
| Anzahl Abtriebsglieder |
7 |
| Umlauffähigkeit Antrieb |
ja |
| |
Anwendung |
| Anwendungsgebiete |
Produktion und verschiedenste Gebiete |
| Anwendungsbeispiele |
The robot can be used in packaging process. For example, the lower arms of this robot can rotate to the right position where a product is in and then the upper arms rotate to push the coupling bar (7) to move down to pick up the product. Placing the product is functioned by the same concept. |
| |
|






 Animationen
Animationen CAX-Dateien
CAX-Dateien Dokumente
Dokumente Videos
Videos Bilder
Bilder








