Estructura del mecanismo |
| Función |
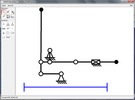
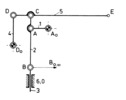
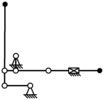
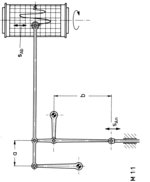
Bild 5.1/12 zeigt das kinematische Schema des Übertragungsgestänges. Die Glieder 1, 2, 3 und 6;0 bilden eine Schubkurbel. An deren Koppelpunkt C ist das Glied 5 angelenkt, das außerdem im Gelenk D durch das im Gestell gelagerte Glied 4 geführt wird.
- Übertragungsgetriebe zur Umwandlung einer Schubbewegung in eine maßstäblich vergrößerte, geradlinige Positionierbewegung des Koppelpunktes
- Ebenes Stephenson-3-Getriebe
Zusätzliche Informationen sind in Getriebetechnik in Beispielen zu finden. |
| Dimensión del mecanismo |
plano |
| Número de elementos |
6 |
| movimiento motor |
Traslación rectilínea |
| Movimiento de salida |
Posición |
| Grados de libertad |
1 |
| Número de entradas |
1 |
| Número de seguidores |
1 |
| Capacidad de rotabilidad |
no |
| Capacidad de rotabilidad del elemento de entrada |
no |
| Posición relativa entre motor y salida |
paralelo |
| |
Función de guía |
| Dirección del enlace |
dirección idéntica |
| Orientación del elemento de salida |
general |
| Dimensión del mecanismo |
plano |
| Referencia de entrada |
sí |
| Variación de la orientación con respecto al elemento de salida |
girando |
| |
Función de transferencia |
| Movimiento de salida |
alta desviación |
| |
Aplicación |
| Área de aplicación |
Other fields |
| Ejemplos de aplicación |
Registriergerät |
| |






 Animations
Animations CAX files
CAX files Images
Images

 Start interactive animation
Start interactive animation