Estructura del mecanismo |
| Función |
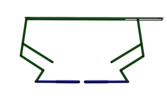
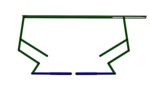
The motion device described in the patent relates to a hospital bed for variably positioning a patient. The hospital bed is based on a linkage with 13 links and 17 joints, which is driven by two cylinders. The degree of freedom of the mechanism is F = 2. |
| Dimensión del mecanismo |
plano |
| Número de elementos |
13 |
| movimiento motor |
Traslación rectilínea |
| Movimiento de salida |
Movimiento del sistema de referencia |
| Grados de libertad |
2 |
| Número de entradas |
2 |
| Número de seguidores |
1 |
| Capacidad de rotabilidad |
no |
| Capacidad de rotabilidad del elemento de entrada |
no |
| Posición relativa entre motor y salida |
intersectando |
| |
Función de guía |
| Dirección del enlace |
dirección contraria |
| Orientación del elemento de salida |
simétrico |
| Dimensión del mecanismo |
plano |
| Referencia de entrada |
sí |
| Variación de la orientación con respecto al elemento de salida |
oscilando: rango desconocido |
| |
Aplicación |
| Área de aplicación |
Medical Science |
| |






 Animations
Animations Videos
Videos Images
Images