  | Pinche para ampliar |
|
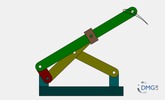
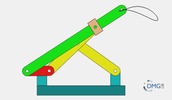
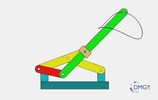
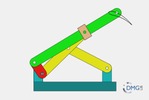
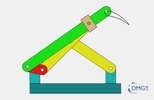
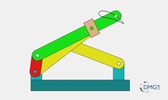
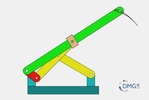
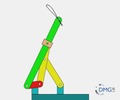
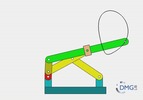
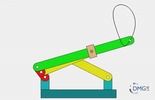
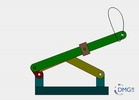
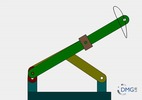
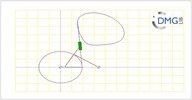
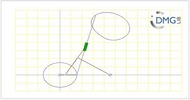
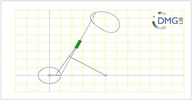
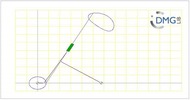
Estructura del mecanismo |
| Función |
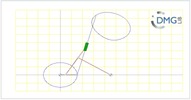
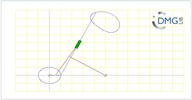
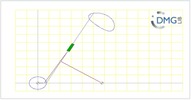
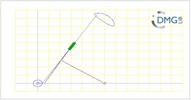
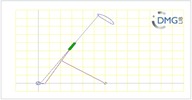
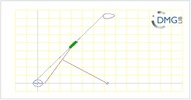
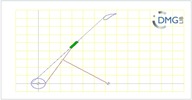
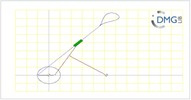
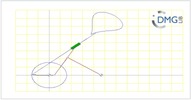
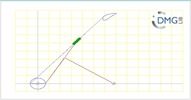
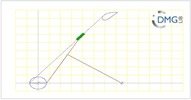
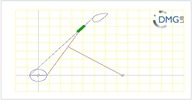
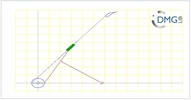
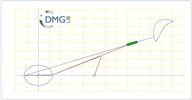
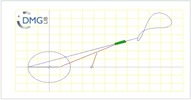
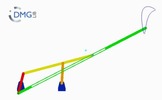
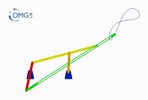
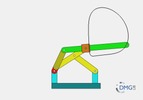
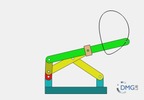
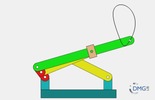
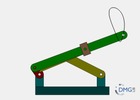
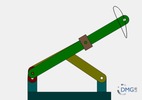
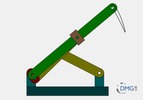
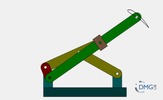
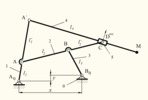
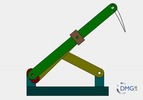
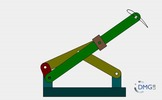
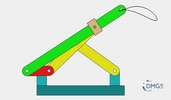
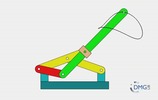
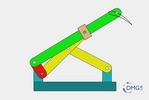
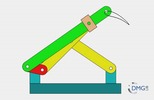
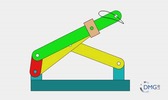
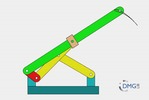
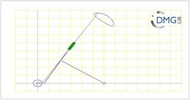
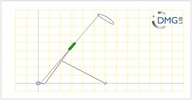
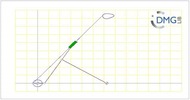
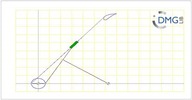
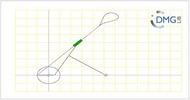
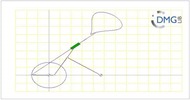
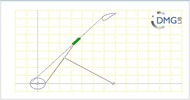
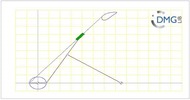
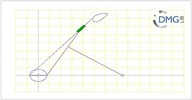
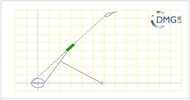
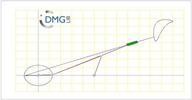
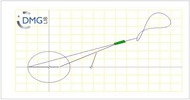
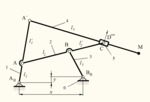
The mechanism contains an inverted slider crank kinematic chain connected in parallel with a four bar linkage. The kinematic chain RTR´s joints are connected with the crank and coupler of the four bar linkage. By means of changing the geometrical lengths of the mechanism´s links, the coupler point M describes a range of coupler curves. |
| Comment |
The movies and interactive animations were generated for the following geometrical dimensions:
Variant 1: l1 = 15 mm, l´1 = 70 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 250 mm
Variant 2: l1 = 15 mm, l´1 = 35 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 250 mm
Variant 3: l1 = 15 mm, l´1 = 15 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 250 mm
Variant 4: l1 = 15 mm, l´1 = 5 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 250 mm
Variant 5: l1 = 15 mm, l´1 = -5 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 250 mm
Variant 6: l1 = 15 mm, l´1 = -10 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 250 mm
Variant 7: l1 = 15 mm, l´1 = -25 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 250 mm
Variant 8: l1 = 15 mm, l´1 = -30 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 250 mm
Variant 9: l1 = 15 mm, l´1 = -45 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 250 mm
Variant 10: l1 = 15 mm, l´1 = -65 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 250 mm
Variant 11: l1 = 15 mm, l´1 = -30 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 230 mm
Variant 12: l1 = 15 mm, l´1 = -30 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 210 mm
Variant 13: l1 = 15 mm, l´1 = -30 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 180 mm
Variant 14: l1 = 15 mm, l´1 = -30 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 280 mm
Variant 15: l1 = 20 mm, l´1 = -40 mm, l2 =80 mm, l2´ = 50 mm, l3 = 40 mm, x = 80 mm, l4 = 250 mm
Variant 16: l1 = 20 mm, l´1 = -60 mm, l2 =80 mm, l2´ = 50 mm, l3 = 40 mm, x = 80 mm, l4 = 220 mm. |
| Dimensión del mecanismo |
plano |
| Número de elementos |
6 |
| movimiento motor |
Rotación |
| Movimiento de salida |
Rotación combinada con traslación rectilínea |
| Grados de libertad |
1 |
| Número de entradas |
1 |
| Número de seguidores |
1 |
| Capacidad de rotabilidad |
no |
| Capacidad de rotabilidad del elemento de entrada |
sí |
| Posición relativa entre motor y salida |
paralelo |
| |
Función de guía |
| Dirección del enlace |
dirección idéntica |
| Orientación del elemento de salida |
general |
| Dimensión del mecanismo |
plano |
| Referencia de entrada |
sí |
| Variación de la orientación con respecto al elemento de salida |
varios |
| |
|






 Animations
Animations CAX files
CAX files Videos
Videos Images
Images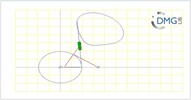
 Start interactive animation
Start interactive animation