Structure du mécanisme |
| Fonction |
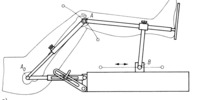
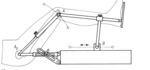
Bild 1.7 zeigt als Beispiel ein in zeitlicher Abhängigkeit zu bewegendes Führungsgetriebe eines Gerätes aus der Medizintechnik. Es dient zur Übung des menschlichen Hüft- und Kniegelenks, zum Wiedererlangen der Beweglichkeit dieser Gelenke nach Verletzungen oder Operationen. Das Führungsgetriebe trägt Ober- und Unterschenkel des Patienten und führt diese in den natürlichen Bewegungsbereichen, wobei die Gelenkachsen des Führungsgetriebes vorher auf die physiologischen Drehachsen der Gelenke des Patienten einzustellen sind. Die Zykluszeit der linearen, motorisierten hin- und hergehenden Antriebsbewegung des Gelenkpunktes B ist ebenfalls einstellbar [1.11].
- Ebene totalschwingfähige Schubschwinge
Eine ausführliche Funktionsbeschreibung des Elementargetriebes: » Doppelschwinge, umlaufschwingfähig |
| taille |
Plan |
| Nombre de liaison |
4 |
| Mouvements input |
Translation rectiligne |
| Mouvement de sortie |
Mouvement d'entraînement |
| Degré de liberté |
1 |
| Nombre d'entrées |
1 |
| Nombre de pièces intermédiaires |
2 |
| Model révolution |
Non |
| Capacité rotative du solide d'entrée |
Non |
| Position relative de la pièce intermédiaire par rapport à la sortie |
Parallèle |
| |
Fonction de guidage |
| Direction de la trajectoire |
Direction identique |
| Orientation du solide de sortie |
Général |
| taille |
Plan |
| Référence d'entrée |
Possible |
| Evolution de l'orientation selon le solide de sortie |
Oscillant : amplitude inconnue |
| |
Application |
| Domaine d'application |
Medical Science |
| |






 Animations
Animations Images
Images

 Start interactive animation
Start interactive animation