  | Cliquez pour agrandir |
|
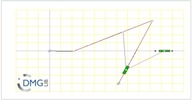
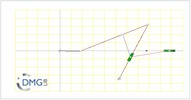
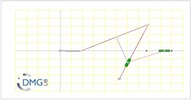
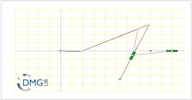
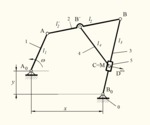
Structure du mécanisme |
| Fonction |
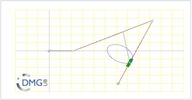
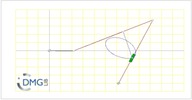
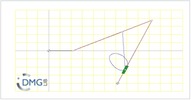
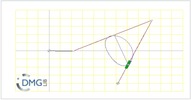
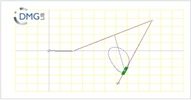
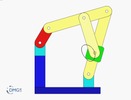
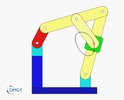
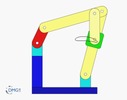
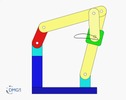
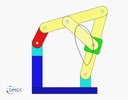
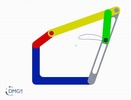
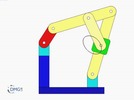
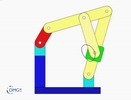
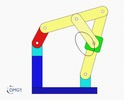
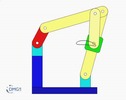
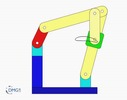
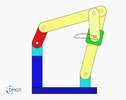
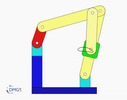
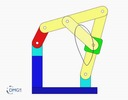
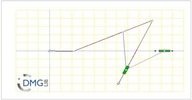
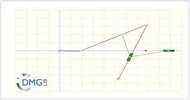
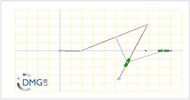
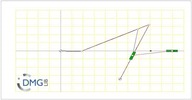
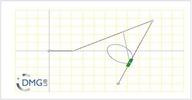
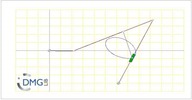
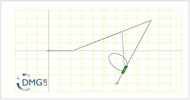
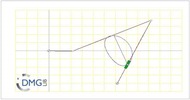
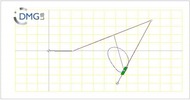
The mechanism contains a slider crank kinematic chain connected in parallel with a four bar linkage. The kinematic chain RRT´s joints are connected with the coupler and rocker of the four bar linkage. By means of changing the geometrical lengths of the mechanism´s links the coupler, point M describes a range of coupler curves. |
| Comment |
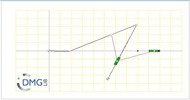
The movies and interactive animations were generated for the geometrical dimensions:
Variant 1: l1 = 13 mm, l2 = 46 mm, l2´ = 28 mm, l3 = 50 mm, l4 = 23 mm, x = 37 mm, y = 24 mm
Variant 2: l1 = 13 mm, l2 = 46 mm, l2´ = 28 mm, l3 = 50 mm, l4 = 28 mm, x = 37 mm, y = 24 mm
Variant 3: l1 = 13 mm, l2 = 46 mm, l2´ = 28 mm, l3 = 50 mm, l4 = 20 mm, x = 37 mm, y = 24 mm
Variant 4: l1 = 13 mm, l2 = 46 mm, l2´ = 25 mm, l3 = 50 mm, l4 = 23 mm, x = 37 mm, y = 24 mm
Variant 5: l1 = 13 mm, l2 = 46 mm, l2´ = 40 mm, l3 = 50 mm, l4 = 23 mm, x = 37 mm, y = 24 mm
Variant 6: l1 = 13 mm, l2 = 46 mm, l2´ = 40 mm, l3 = 50 mm, l4 = 20 mm, x = 37 mm, y = 24 mm
Variant 7: l1 = 13 mm, l2 = 46 mm, l2´ = 40 mm, l3 = 50 mm, l4 = 18 mm, x = 37 mm, y = 24 mm
Variant 8: l1 = 13 mm, l2 = 46 mm, l2´ = 40 mm, l3 = 50 mm, l4 = 28 mm, x = 37 mm, y = 24 mm
Variant 9: l1 = 13 mm, l2 = 46 mm, l2´ = 23 mm, l3 = 50 mm, l4 = 23 mm, x = 37 mm, y = 24 mm
Variant 10: l1 = 13 mm, l2 = 46 mm, l2´ = 18 mm, l3 = 50 mm, l4 = 23 mm, x = 37 mm, y = 24 mm |
| taille |
Plan |
| Nombre de liaison |
6 |
| Mouvements input |
Rotation |
| Mouvement de sortie |
Rotation combinée avec une translation rectiligne |
| Degré de liberté |
1 |
| Nombre d'entrées |
1 |
| Nombre de pièces intermédiaires |
1 |
| Model révolution |
Peut-être |
| Capacité rotative du solide d'entrée |
Oui |
| Position relative de la pièce intermédiaire par rapport à la sortie |
Parallèle |
| |
Fonction de guidage |
| Direction de la trajectoire |
Direction identique |
| Orientation du solide de sortie |
Général |
| taille |
Plan |
| Référence d'entrée |
Oui |
| Evolution de l'orientation selon le solide de sortie |
Divers |
| |
|






 Animations
Animations Fichiers xAO
Fichiers xAO Videos
Videos Images
Images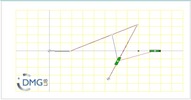
 Start interactive animation
Start interactive animation