  | Cliquez pour agrandir |
|
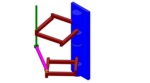
Structure du mécanisme |
| Fonction |
Version française: Le robot consiste en deux niveaux (I), (II). Chaque niveau est consisté en deux actionneurs (1), (2) qui sont reliés à
un support (3). Une extrémité de chaque bras horizontal (4), (8) est reliée à l'actionneur (1), (2) respectivement, et une extrémité de chaque bras (5), (9) est reliée à l'extrémité libre du bras (4), (8) respectivement. Les autres extrémités des bras (5), (9) sont reliées ensemble au point (6) qui se déplace dans un plan horizontal à deux degrés de mobilité. Le niveau (I) point (6) et le niveau (II) point (6) sont reliés au moyen d'un mécanisme de couplage (7) l'une des connexions citées consistant en une liaison pivot et l'autre consistant en une liaison cylindrique. Selon l'invention, un outil (10) est assemblé au point (6) consistant en une liaison cylindrique et l’outil cité peut se déplacer à quatre degrés de mobilité, trois mouvements de translation et un mouvement de rotation le long d'un axe vertical. |
| Comment |
Auteur : Pommarin TANGSITTISIN
Modifié par : Khaled-Assad ARROUK
IFMA (Institut Français de Mécanique Avancée) – http://www.ifma.fr
Clermont-Ferrand, France |
| taille |
Spatial |
| Nombre de liaison |
12 |
| Mouvements input |
rotation combinée avec une translation rectiligne |
| Degré de liberté |
4 |
| Nombre d'entrées |
4 |
| Nombre de pièces intermédiaires |
7 |
| Capacité rotative du solide d'entrée |
Oui |
| |
Application |
| Domaine d'application |
Production and Various fields |
| Exemples d'utilisation |
Le robot peut être utilisé dans le processus d'emballage. Par exemple, les bras inférieurs de ce robot peuvent tourner autour de la bonne position où un produit est, puis les bras tournent à pousser la barre d'accouplement (7) de se déplacer pour ramasser le produit. Le placement du produit est effectué par le même concept. |
| |
|






 Animations
Animations Fichiers xAO
Fichiers xAO Documents
Documents Videos
Videos Images
Images








