Struttura del meccanismo |
| Funzione |
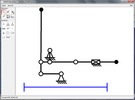
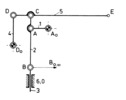
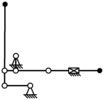
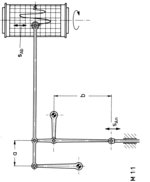
Bild 5.1/12 zeigt das kinematische Schema des Übertragungsgestänges. Die Glieder 1, 2, 3 und 6;0 bilden eine Schubkurbel. An deren Koppelpunkt C ist das Glied 5 angelenkt, das außerdem im Gelenk D durch das im Gestell gelagerte Glied 4 geführt wird.
- Übertragungsgetriebe zur Umwandlung einer Schubbewegung in eine maßstäblich vergrößerte, geradlinige Positionierbewegung des Koppelpunktes
- Ebenes Stephenson-3-Getriebe
Zusätzliche Informationen sind in Getriebetechnik in Beispielen zu finden. |
| Dimensione del meccanismo |
planare |
| Numero di membri |
6 |
| Movimento del movente |
Traslazione rettilinea |
| Moto del cedente |
Posizione |
| Gradi di libertà |
1 |
| Numero di membri moventi |
1 |
| Numero di membri cedenti |
1 |
| Capacità di rotazione |
no |
| Capacità di rotazione del membro movente |
no |
| Posizione relativa tra movente e cedente |
parallelo |
| |
Funzione di movente |
| Direzione della traiettoria |
direzione identica |
| Orientazione del membro cedente |
complessivo |
| Dimensione del meccanismo |
planare |
| Riferimento del movente |
si |
| Verso di orientazione del membro cedente |
rotolamento |
| |
Funzione di trasferimento |
| Moto del cedente |
Ampio scostamento |
| |
Applicazione |
| Area di applicazione |
Other fields |
| Esempi di applicazione |
Registriergerät |
| |






 Animations
Animations CAX files
CAX files Images
Images

 Start interactive animation
Start interactive animation