  | Premi per ingrandire |
|
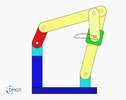
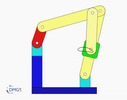
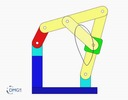
Struttura del meccanismo |
| Funzione |
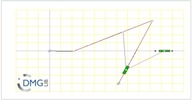
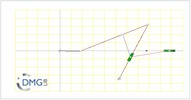
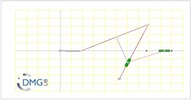
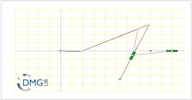
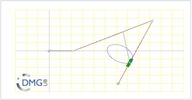
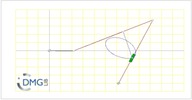
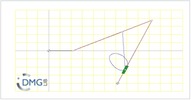
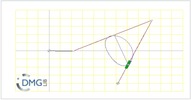
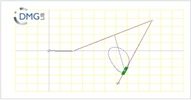
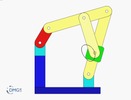
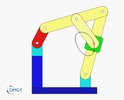
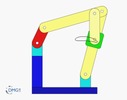
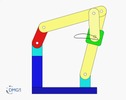
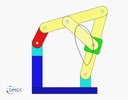
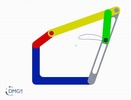
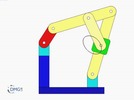
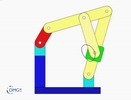
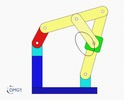
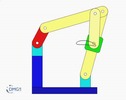
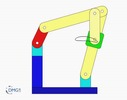
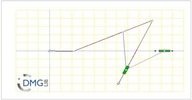
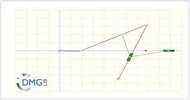
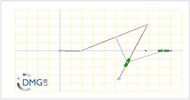
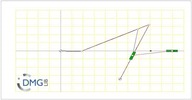
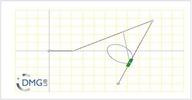
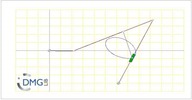
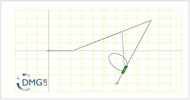
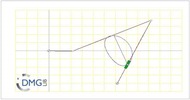
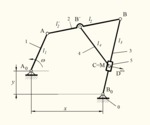
The mechanism contains a slider crank kinematic chain connected in parallel with a four bar linkage. The kinematic chain RRT´s joints are connected with the coupler and rocker of the four bar linkage. By means of changing the geometrical lengths of the mechanism´s links the coupler, point M describes a range of coupler curves. |
| Comment |
The movies and interactive animations were generated for the geometrical dimensions:
Variant 1: l1 = 13 mm, l2 = 46 mm, l2´ = 28 mm, l3 = 50 mm, l4 = 23 mm, x = 37 mm, y = 24 mm
Variant 2: l1 = 13 mm, l2 = 46 mm, l2´ = 28 mm, l3 = 50 mm, l4 = 28 mm, x = 37 mm, y = 24 mm
Variant 3: l1 = 13 mm, l2 = 46 mm, l2´ = 28 mm, l3 = 50 mm, l4 = 20 mm, x = 37 mm, y = 24 mm
Variant 4: l1 = 13 mm, l2 = 46 mm, l2´ = 25 mm, l3 = 50 mm, l4 = 23 mm, x = 37 mm, y = 24 mm
Variant 5: l1 = 13 mm, l2 = 46 mm, l2´ = 40 mm, l3 = 50 mm, l4 = 23 mm, x = 37 mm, y = 24 mm
Variant 6: l1 = 13 mm, l2 = 46 mm, l2´ = 40 mm, l3 = 50 mm, l4 = 20 mm, x = 37 mm, y = 24 mm
Variant 7: l1 = 13 mm, l2 = 46 mm, l2´ = 40 mm, l3 = 50 mm, l4 = 18 mm, x = 37 mm, y = 24 mm
Variant 8: l1 = 13 mm, l2 = 46 mm, l2´ = 40 mm, l3 = 50 mm, l4 = 28 mm, x = 37 mm, y = 24 mm
Variant 9: l1 = 13 mm, l2 = 46 mm, l2´ = 23 mm, l3 = 50 mm, l4 = 23 mm, x = 37 mm, y = 24 mm
Variant 10: l1 = 13 mm, l2 = 46 mm, l2´ = 18 mm, l3 = 50 mm, l4 = 23 mm, x = 37 mm, y = 24 mm |
| Dimensione del meccanismo |
planare |
| Numero di membri |
6 |
| Movimento del movente |
Rotazione |
| Moto del cedente |
Rototraslazione |
| Gradi di libertà |
1 |
| Numero di membri moventi |
1 |
| Numero di membri cedenti |
1 |
| Capacità di rotazione |
probabilmente |
| Capacità di rotazione del membro movente |
sì |
| Posizione relativa tra movente e cedente |
parallelo |
| |
Funzione di movente |
| Direzione della traiettoria |
direzione identica |
| Orientazione del membro cedente |
complessivo |
| Dimensione del meccanismo |
planare |
| Riferimento del movente |
si |
| Verso di orientazione del membro cedente |
Vario |
| |
|






 Animations
Animations CAX files
CAX files Videos
Videos Images
Images
 Start interactive animation
Start interactive animation