Structura mecanismului |
| Funcţie |
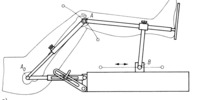
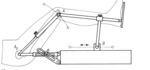
Bild 1.7 zeigt als Beispiel ein in zeitlicher Abhängigkeit zu bewegendes Führungsgetriebe eines Gerätes aus der Medizintechnik. Es dient zur Übung des menschlichen Hüft- und Kniegelenks, zum Wiedererlangen der Beweglichkeit dieser Gelenke nach Verletzungen oder Operationen. Das Führungsgetriebe trägt Ober- und Unterschenkel des Patienten und führt diese in den natürlichen Bewegungsbereichen, wobei die Gelenkachsen des Führungsgetriebes vorher auf die physiologischen Drehachsen der Gelenke des Patienten einzustellen sind. Die Zykluszeit der linearen, motorisierten hin- und hergehenden Antriebsbewegung des Gelenkpunktes B ist ebenfalls einstellbar [1.11].
- Ebene totalschwingfähige Schubschwinge
Eine ausführliche Funktionsbeschreibung des Elementargetriebes: » Doppelschwinge, umlaufschwingfähig |
| Dimensiunea mecanismului |
plan |
| Numărul de elemente |
4 |
| mişcarea de antrenare |
Translaţie rectilinie |
| Mişcarea elementului de ieşire |
Mişcarea de bază |
| Grad de libertate |
1 |
| Numǎrul elementelor de intrare |
1 |
| Numǎrul tacheţilor |
2 |
| Posibilitatea unei rotaţii complete |
nu |
| Posibilitatea unei relaţii complete a elementului de intrare |
nu |
| Poziţia relativǎ dintre intrare şi ieşire |
paralel |
| |
Funcţia de ghidare |
| Direcţia traiectoriei |
acelaşi sens |
| Orientarea elementului de ieşire |
general |
| Dimensiunea mecanismului |
plan |
| Originea intrǎrii |
posibil |
| Evoluţia orientǎrii elementului de ieşire |
oscilant:amplitudine necunoscutǎ |
| |
Aplicaţie |
| Domeniul de aplicaţie |
Medical Science |
| |






 Animations
Animations Images
Images

 Start interactive animation
Start interactive animation