Structura mecanismului |
| Funcţie |
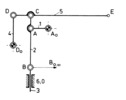
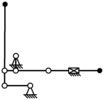
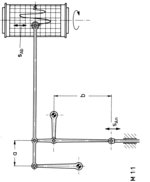
Bild 5.1/12 zeigt das kinematische Schema des Übertragungsgestänges. Die Glieder 1, 2, 3 und 6;0 bilden eine Schubkurbel. An deren Koppelpunkt C ist das Glied 5 angelenkt, das außerdem im Gelenk D durch das im Gestell gelagerte Glied 4 geführt wird.
- Übertragungsgetriebe zur Umwandlung einer Schubbewegung in eine maßstäblich vergrößerte, geradlinige Positionierbewegung des Koppelpunktes
- Ebenes Stephenson-3-Getriebe
Zusätzliche Informationen sind in Getriebetechnik in Beispielen zu finden. |
| Dimensiunea mecanismului |
plan |
| Numărul de elemente |
6 |
| mişcarea de antrenare |
Translaţie rectilinie |
| Mişcarea elementului de ieşire |
Poziţie |
| Grad de libertate |
1 |
| Numǎrul elementelor de intrare |
1 |
| Numǎrul tacheţilor |
1 |
| Posibilitatea unei rotaţii complete |
nu |
| Posibilitatea unei relaţii complete a elementului de intrare |
nu |
| Poziţia relativǎ dintre intrare şi ieşire |
paralel |
| |
Funcţia de ghidare |
| Direcţia traiectoriei |
acelaşi sens |
| Orientarea elementului de ieşire |
general |
| Dimensiunea mecanismului |
plan |
| Originea intrǎrii |
da |
| Evoluţia orientǎrii elementului de ieşire |
rotire |
| |
Funcţia de transfer |
| Mimişcarea de ieşire |
deviaţie mare |
| |
Aplicaţie |
| Domeniul de aplicaţie |
Other fields |
| Exemple de aplicare |
Registriergerät |
| |






 Animations
Animations CAX files
CAX files Images
Images

 Start interactive animation
Start interactive animation