Structura mecanismului |
| Funcţie |
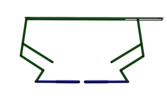
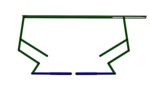
The motion device described in the patent relates to a hospital bed for variably positioning a patient. The hospital bed is based on a linkage with 13 links and 17 joints, which is driven by two cylinders. The degree of freedom of the mechanism is F = 2. |
| Dimensiunea mecanismului |
plan |
| Numărul de elemente |
13 |
| mişcarea de antrenare |
Translaţie rectilinie |
| Mişcarea elementului de ieşire |
Mişcarea de bază |
| Grad de libertate |
2 |
| Numǎrul elementelor de intrare |
2 |
| Numǎrul tacheţilor |
1 |
| Posibilitatea unei rotaţii complete |
nu |
| Posibilitatea unei relaţii complete a elementului de intrare |
nu |
| Poziţia relativǎ dintre intrare şi ieşire |
intersectare |
| |
Funcţia de ghidare |
| Direcţia traiectoriei |
sens contrar |
| Orientarea elementului de ieşire |
simetric |
| Dimensiunea mecanismului |
plan |
| Originea intrǎrii |
da |
| Evoluţia orientǎrii elementului de ieşire |
oscilant:amplitudine necunoscutǎ |
| |
Aplicaţie |
| Domeniul de aplicaţie |
Medical Science |
| |






 Animations
Animations Videos
Videos Images
Images