  | Click pentru a mări |
|
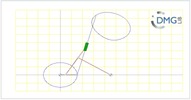
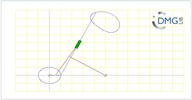
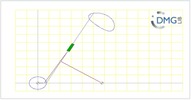
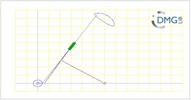
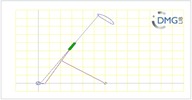
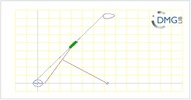
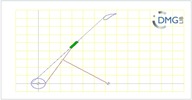
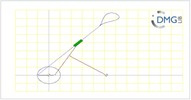
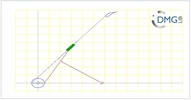
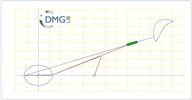
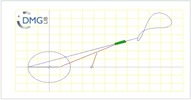
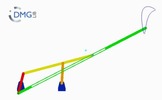
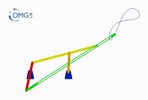
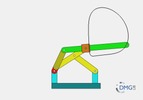
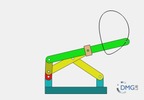
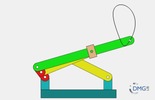
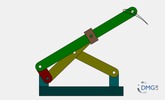
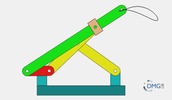
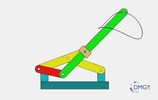
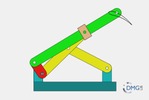
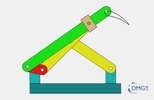
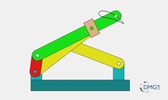
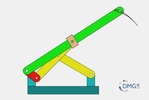
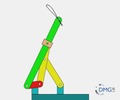
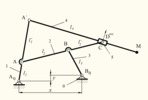
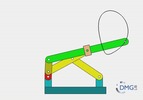
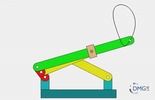
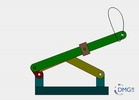
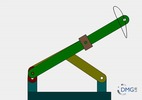
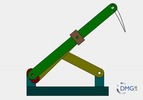
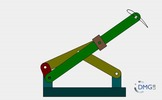
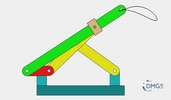
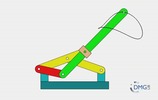
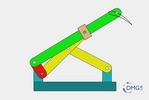
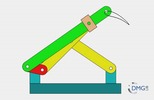
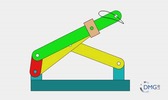
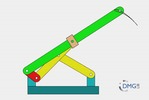
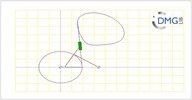
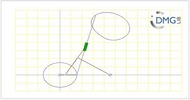
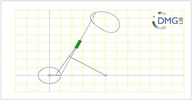
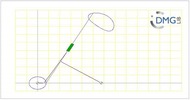
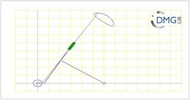
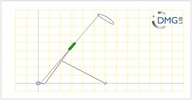
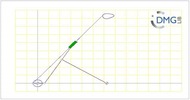
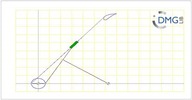
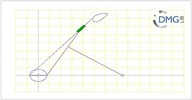
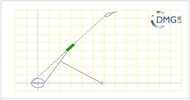
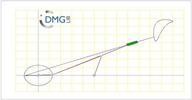
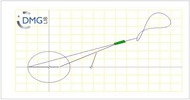
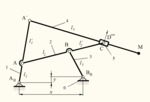
Structura mecanismului |
| Funcţie |
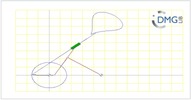
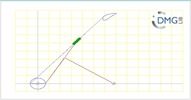
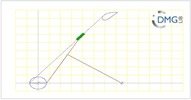
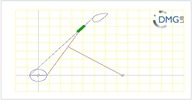
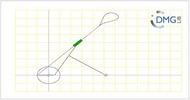
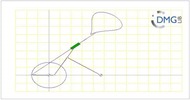
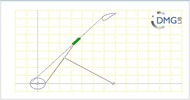
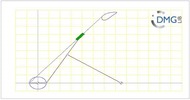
Mecanismul conţine un mecanism patrulater articulat legat ȋn paralel cu un lanţ cinematic RTR – culisă oscilantă. Cuplele de legătură a lanţului cinematic sunt legate de manivela şi biela mecanismului patrulater articulat. Prin modificarea dimensiunilor geometrice ale mecanismului, punctul M al culisei generează o gamă de curbe de bielă. |
| Comment |
Filmele si animatiile interactive au fost generate pentru urmatoarele dimensiuni geometrice:
Varianta 1: l1 = 15 mm, l´1 = 70 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 250 mm
Varianta 2: l1 = 15 mm, l´1 = 35 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 250 mm
Varianta 3: l1 = 15 mm, l´1 = 15 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 250 mm
Varianta 4: l1 = 15 mm, l´1 = 5 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 250 mm
Varianta 5: l1 = 15 mm, l´1 = -5 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 250 mm
Varianta 6: l1 = 15 mm, l´1 = -10 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 250 mm
Varianta 7: l1 = 15 mm, l´1 = -25 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 250 mm
Varianta 8: l1 = 15 mm, l´1 = -30 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 250 mm
Varianta 9: l1 = 15 mm, l´1 = -45 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 250 mm
Varianta 10: l1 = 15 mm, l´1 = -65 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 250 mm
Varianta 11: l1 = 15 mm, l´1 = -30 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 230 mm
Varianta 12: l1 = 15 mm, l´1 = -30 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 210 mm
Varianta 13: l1 = 15 mm, l´1 = -30 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 180 mm
Varianta 14: l1 = 15 mm, l´1 = -30 mm, l2 =80 mm, l2´ = 50 mm, l3 = 120 mm, x = 150 mm, l4 = 280 mm
Varianta 15: l1 = 20 mm, l´1 = -40 mm, l2 =80 mm, l2´ = 50 mm, l3 = 40 mm, x = 80 mm, l4 = 250 mm
Varianta 16: l1 = 20 mm, l´1 = -60 mm, l2 =80 mm, l2´ = 50 mm, l3 = 40 mm, x = 80 mm, l4 = 220 mm. |
| Dimensiunea mecanismului |
plan |
| Numărul de elemente |
6 |
| mişcarea de antrenare |
Rotaţie |
| Mişcarea elementului de ieşire |
Rotaţie combinatǎ cu translaţie rectilinie |
| Grad de libertate |
1 |
| Numǎrul elementelor de intrare |
1 |
| Numǎrul tacheţilor |
1 |
| Posibilitatea unei rotaţii complete |
nu |
| Posibilitatea unei relaţii complete a elementului de intrare |
da |
| Poziţia relativǎ dintre intrare şi ieşire |
paralel |
| |
Funcţia de ghidare |
| Direcţia traiectoriei |
acelaşi sens |
| Orientarea elementului de ieşire |
general |
| Dimensiunea mecanismului |
plan |
| Originea intrǎrii |
da |
| Evoluţia orientǎrii elementului de ieşire |
amestecate |
| |
|






 Animations
Animations CAX files
CAX files Videos
Videos Images
Images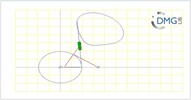
 Start interactive animation
Start interactive animation