Structure du mécanisme |
| Fonction |
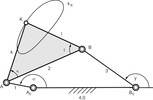
In der Praxis kommt es häufig vor, dass für eine vorgegebene Punktführungs-Aufgabe zwar ein viergliedriges Kurbelgetriebe mit vier Drehgelenken gefunden wurde, von dem ein Koppelpunkt K die gewünschte Koppelkurve kK durchläuft, dass jedoch die übrigen Eigenschaften des Gelenkvierecks, wie die Abmessungen der Getriebeglieder, der Verlauf des Übertragungswinkels, die Lagen der Gestellpunkte oder der Platzbedarf, ungünstig sind. Mit Hilfe des Satzes von Roberts/ Tschebyschev über die dreifache Erzeugung von Koppelkurven kann man nun zu diesem vorher bestimmten Getriebe zwei weitere Gelenkvierecke ermitteln, die die gleiche Koppelkurve erzeugen, die aber aufgrund anderer Eigenschaften für den Anwendungsfall geeigneter sein können.
Weitere Informationen zu diesem Getriebe finden sich in der Modellbeschreibung zum Satz von Roberts. |
| taille |
Plan |
| Nombre de liaison |
4 |
| Mouvements input |
Rotation |
| Mouvement de sortie |
Position |
| Degré de liberté |
1 |
| Nombre d'entrées |
1 |
| Nombre de pièces intermédiaires |
1 |
| Model révolution |
Oui |
| Capacité rotative du solide d'entrée |
Oui |
| Position relative de la pièce intermédiaire par rapport à la sortie |
Parallèle |
| |
Fonction de guidage |
| Direction de la trajectoire |
Direction identique |
| Orientation du solide de sortie |
Général |
| taille |
Plan |
| Référence d'entrée |
Possible |
| Evolution de l'orientation selon le solide de sortie |
Oscillant : amplitude inconnue |
| |
Application |
| Domaine d'application |
Academic use |
| |







 Fichiers xAO
Fichiers xAO Videos
Videos PDFs
PDFs Images
Images










 Show PDF: Getriebe105.pdf
Show PDF: Getriebe105.pdf