| Click to enlarge |
|
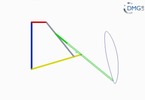
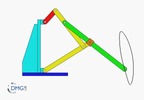
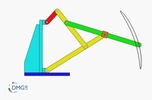
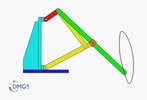
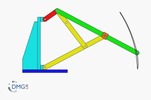
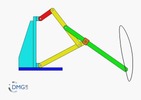
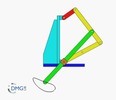
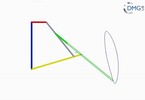
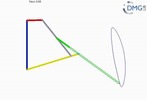
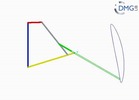
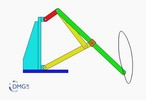
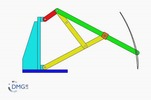
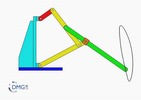
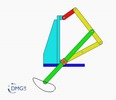
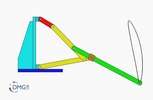
Structure of mechanism |
| Function |
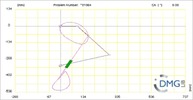
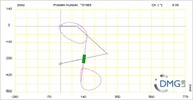
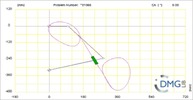
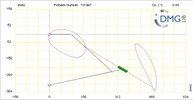
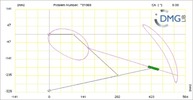
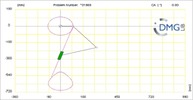
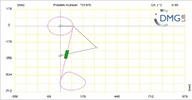
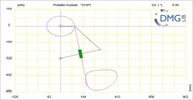
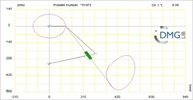
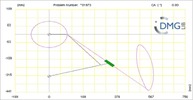
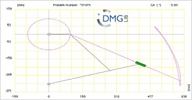
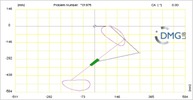
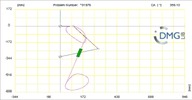
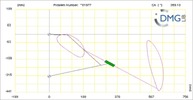
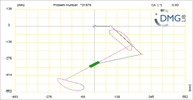
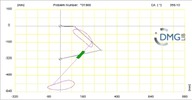
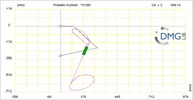
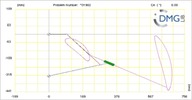
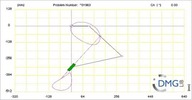
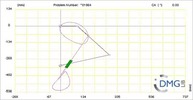
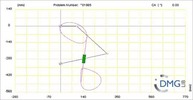
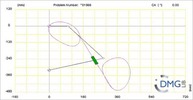
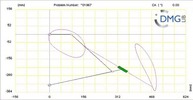
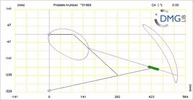
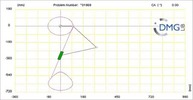
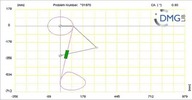
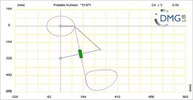
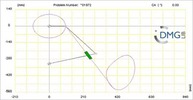
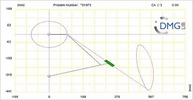
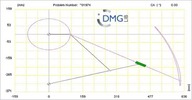
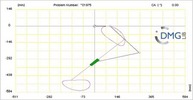
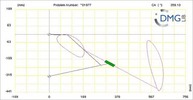
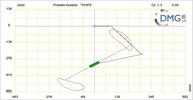
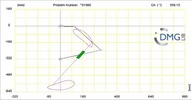
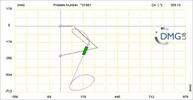
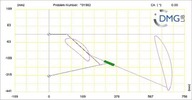
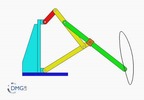
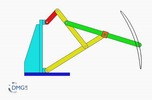
The mechanism contains a four bar linkage kinematic chain connected in parallel with a slider crank. The kinematic chain RTR´s joints are connected with the coupler and rocker of the four bar linkage. By means of changing the geometrical lengths of the mechanism´s links the coupler point M describe a range of coupler curves. |
| Comment |
The movies and interactive animations were generated for the following geometrical dimensions:
Variant 1: l1 = 320 mm, l2 = 100 mm, l3 = 300 mm, l3´ = 100 mm, l4 = 300 mm, l4´ = 0 mm, l5 = 500 mm
Variant 2: l1 = 320 mm, l2 = 100 mm, l3 = 300 mm, l3´ = 100 mm, l4 = 300 mm, l4´ = 50 mm, l5 = 500 mm
Variant 3: l1 = 320 mm, l2 = 100 mm, l3 = 300 mm, l3´ = 100 mm, l4 = 300 mm, l4´ = 150 mm, l5 = 500 mm
Variant 4: l1 = 320 mm, l2 = 100 mm, l3 = 300 mm, l3´ = 100 mm, l4 = 300 mm, l4´ = 250 mm, l5 = 500 mm
Variant 5: l1 = 320 mm, l2 = 100 mm, l3 = 300 mm, l3´ = 100 mm, l4 = 300 mm, l4´ = 350 mm, l5 = 500 mm
Variant 6: l1 = 320 mm, l2 = 100 mm, l3 = 300 mm, l3´ = 100 mm, l4 = 300 mm, l4´ = 450 mm, l5 = 500 mm
Variant 7: l1 = 320 mm, l2 = 100 mm, l3 = 300 mm, l3´ = 0 mm, l4 = 300 mm, l4´ = 0 mm, l5 = 600 mm
Variant 8: l1 = 320 mm, l2 = 100 mm, l3 = 300 mm, l3´ = 0 mm, l4 = 300 mm, l4´ = 50 mm, l5 = 600 mm
Variant 9: l1 = 320 mm, l2 = 100 mm, l3 = 300 mm, l3´ = 0 mm, l4 = 300 mm, l4´ = 150 mm, l5 = 600 mm
Variant 10: l1 = 320 mm, l2 = 100 mm, l3 = 300 mm, l3´ = 0 mm, l4 = 300 mm, l4´ = 250 mm, l5 = 600 mm
Variant 11: l1 = 320 mm, l2 = 100 mm, l3 = 300 mm, l3´ = 0 mm, l4 = 300 mm, l4´ = 350 mm, l5 = 600 mm
Variant 12: l1 = 320 mm, l2 = 100 mm, l3 = 300 mm, l3´ = 0 mm, l4 = 300 mm, l4´ = 450 mm, l5 = 600 mm
Variant 13: l1 = 320 mm, l2 = 100 mm, l3 = 300 mm, l3´ = 150 mm, l4 = 300 mm, l4´ = 0 mm, l5 = 500 mm
Variant 14: l1 = 320 mm, l2 = 100 mm, l3 = 300 mm, l3´ = 150 mm, l4 = 300 mm, l4´ = 150 mm, l5 = 500 mm
Variant 15: l1 = 320 mm, l2 = 100 mm, l3 = 300 mm, l3´ = 150 mm, l4 = 300 mm, l4´ = 350 mm, l5 = 500 mm
Variant 16: l1 = 320 mm, l2 = 100 mm, l3 = 300 mm, l3´ = 200 mm, l4 = 300 mm, l4´ = 0 mm, l5 = 500 mm
Variant 17: l1 = 320 mm, l2 = 100 mm, l3 = 300 mm, l3´ = 200 mm, l4 = 300 mm, l4´ = 150 mm, l5 = 500 mm
Variant 18: l1 = 320 mm, l2 = 100 mm, l3 = 300 mm, l3´ = 200 mm, l4 = 300 mm, l4´ = 200 mm, l5 = 500 mm
Variant 19: l1 = 320 mm, l2 = 100 mm, l3 = 300 mm, l3´ = 200 mm, l4 = 300 mm, l4´ = 350 mm, l5 = 500 mm. |
| Dimension of mechanism |
planar |
| Number of links |
6 |
| Drive movement |
Rotation |
| Output movement |
Rotation combined with rectilinear translation |
| Degree of freedom |
1 |
| Fundamental mechanism |
 Link containing mechanism Link containing mechanism |
| Number of inputs |
1 |
| Number of followers |
1 |
| Revolution ability |
yes |
| Revolution ability of input link |
yes |
| Relative position between drive and output |
parallel |
| |
|






 Animations
Animations CAX files
CAX files Videos
Videos Images
Images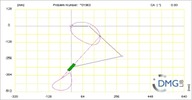
 Start interactive animation
Start interactive animation