





|
|
||||||||||
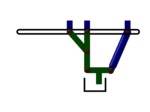
Machine for multiaxial movement of a tool or a part |
||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
 Click to enlarge Click to enlarge
|
Description
The motion device described in the patent relates to a machine for multiaxial movement of a tool or a part. The machine is based on a linkage with 9 links and 10 joints, which is driven by three sliding elements and a cylinder. The degree of freedom of the mechanism is F = 4. |
|||||||||
| Technical data | ||||||||||
|
||||||||||
| Linked items | ||||||||||
|
||||||||||
| Permanent links | ||||||||||
|
|
||||||||||
| Data provider | ||||||||||
|
|
||||||||||
| Administrative information | ||||||||||
|
||||||||||