Structure of mechanism |
| Function |
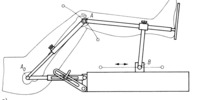
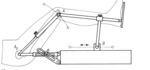
Bild 1.7 zeigt als Beispiel ein in zeitlicher Abhängigkeit zu bewegendes Führungsgetriebe eines Gerätes aus der Medizintechnik. Es dient zur Übung des menschlichen Hüft- und Kniegelenks, zum Wiedererlangen der Beweglichkeit dieser Gelenke nach Verletzungen oder Operationen. Das Führungsgetriebe trägt Ober- und Unterschenkel des Patienten und führt diese in den natürlichen Bewegungsbereichen, wobei die Gelenkachsen des Führungsgetriebes vorher auf die physiologischen Drehachsen der Gelenke des Patienten einzustellen sind. Die Zykluszeit der linearen, motorisierten hin- und hergehenden Antriebsbewegung des Gelenkpunktes B ist ebenfalls einstellbar [1.11].
- Ebene totalschwingfähige Schubschwinge
Eine ausführliche Funktionsbeschreibung des Elementargetriebes: » Doppelschwinge, umlaufschwingfähig |
| Dimension of mechanism |
planar |
| Number of links |
4 |
| Drive movement |
Rectilinear translation |
| Output movement |
Frame motion |
| Degree of freedom |
1 |
| Fundamental mechanism |
 Link containing mechanism Link containing mechanism |
| Number of inputs |
1 |
| Number of followers |
2 |
| Revolution ability |
no |
| Revolution ability of input link |
no |
| Relative position between drive and output |
parallel |
| |
Guidance function |
| Direction of the path |
identical direction |
| Orientation of output link |
general |
| Trace of a dedicated point on follower |
 Open trace Open trace |
| Dimension of mechanism |
planar |
| Input reference |
possible |
| Progress of orientation respecting output link |
oscillating: unknown range |
| |
Application |
| Application area |
Medical Science |
| |






 Animations
Animations Images
Images

 Start interactive animation
Start interactive animation