|
|
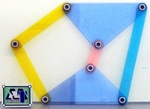
Stephensonsche Kette |
  | Click pentru a mări |
|
Structura mecanismului |
| Funcţie |
Die Darstellung der kinematischen Kette zeigt nur den strukturellen Zusammenhang der Glieder und Gelenke ohne jeden Hinweis auf ihre Funktionen, Formen und Abmessungen. Es lassen sich grundsätzlich offene und geschlossene Strukturen unterscheiden.
Wird ein Getriebeglied gegenüber den anderen zum Bezugsglied (Gestell), so entsteht aus der Kette ein Mechanismus. Werden zudem An- und Abtriebsglieder festgelegt, so handelt es sich definitionsgemäß um ein Getriebe.
Im Fall der Stephensonschen Kette, bei der die beiden ternären Glieder nicht durch ein Gelenk miteinander verbunden sind, lassen sich durch Festlegung des Gestellgliedes drei verschiedene Getriebe herleiten. |
| Dimensiunea mecanismului |
plan |
| Numărul de elemente |
6 |
| Grad de libertate |
1 |
| Posibilitatea unei rotaţii complete |
poate |
| Poziţia relativǎ dintre intrare şi ieşire |
paralel |
| |
Aplicaţie |
| Domeniul de aplicaţie |
Academic use |
| |
|
| Collections |
| |
|
| Permanent links |
| |
|
| Data provider |
| |
|
| Administraţie |
| |
| Loc |
|
Technische Universität Chemnitz, Professur Mechatronische Antriebstechnik |
| Producǎtor |
|
TH Karl-Marx-Stadt |
| Realizare, material |
|
Standmodell aus Holz und Metall |
|
| Further media formats |
 Images Images |
|






