| Description |
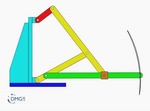
The mechanism contains a four bar linkage kinematic chain connected in parallel with an inverted slider crank. The kinematic chain RTR´s joints are connected with the rocker and the coupler of the four bar linkage. By means of changing the geometrical lengths of the mechanism´s links the coupler point M describe a range of coupler curves.
The file was created with the CAD software SolidWorks for the geometrical dimensions: l1 = 320 mm, l2 = 100 mm, l3 = 300 mm, l3´ = 450 mm, l4 = 300 mm, l4´ = 50 mm, l5 = 500 mm. |






 Click to enlarge
Click to enlarge