|
CapaMan2bis Spazio di Lavoro con movimento di 2 gambe
Questo video mostra lo spazio di lavoro del prototipo CapaMan2bis con movimento di 2 gambe. Il movimento di ciascuna gamba è mantenuto all'interno del massimo intervallo ottenibile.
|

|
LARM Hand IV
Questo video mostra il funzionamento tipico della LARM Hand IV, un prototipo dotato di tre dita con tre falangi ciascuna. Ciascun dito è movimentato da un singolo motore ed ha caratteristiche di modularità. Pertanto, è possibile realizzare mani con un diverso numero di dita aggiungendo o togliendo moduli.
|

|
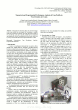
Cassino Hexapod
Foto del Cassino Hexapod, prototipo realizzato presso il LARM nel 2007 dotato di 6 gambe ciascuna dotata di 3 motori a corrente continua di cui uno per la movimentazione di una ruota posta sull'estremità della gamba
|

|
Video of Cassino Hexapod
Questo è un video del prototipo denominato Cassino Hexapod, progettato e realizzato presso il LARM nel 2007. E' composto di 6 gambe dotate ciascuna di 3 motori a corrente continua. Uno dei motori è utilizzato per la rotazione di una ruota posta all'estremità della gamba che consente movimentazioni rapide su superfici piane.
|

|
Foto del CaPaMan2 bis
Foto del prototipo denominato CaPaMan 2bis (Cassino Parallel Manipulator versione 2bis) progettato e costruito presso il LARM nel 2005. Questo prototipo di manipolatore parallelo è dotato di 3 gradi di libertà attuati da motori a corrente continua. La piattaforma è dotata di 6 gradi di mobilità.
|
|
|
video del CaPaMan2bis
video del prototipo denominato CaPaMan 2bis (Cassino Parallel Manipulator version 2bis) progettato e realizzato presso il LARM nel 2005. Questo prototipo di manipolaore parallelo ha 3 gradi di libertà attuati mediante 3 motori a corrente continua. La piattaforma mobile è dotata di 6 gradi di mobilità.
|

|
capaman2bis vista laterale
Vista laterale del prototipo CaPaMan 2bis (Cassino Parallel Manipulator versione 2bis).
|

|
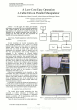
Cassino cam test-bed versione 2006
Questa foto mostra un prototipo di banco prova denominato Cassino Cam test-bed versione 2006 che è stato progettato e realizzato presso il LARM in Cassino nel 2006. Questo banco prova per camme piane è dotato di un encoder sull'albero motore, movimentato da un motore a corrente continua su cui viene effettuata la misura della corrente di alimentazione. Un accelerometro è montato sul cedente.
|

|
Video del Cassino Cam test-bed versione 2006
Questa video mostra un prototipo di banco prova denominato Cassino Cam test-bed versione 2006 che è stato progettato e realizzato presso il LARM in Cassino nel 2006. Questo banco prova per camme piane è dotato di un encoder sull'albero motore, movimentato da un motore a corrente continua su cui viene effettuata la misura della corrente di alimentazione. Un accelerometro è montato sul cedente.
|

|
Foto del BAPAMAN (Binary Parallel Manipulator)
Questa foto mostra un prototipo di manipolatore parallelo modulare ad attuazione binaria denominato BAPAMAN che è stato progettato presso il LARM in collaborazione con l’istituto IWF di Braunschweig Germania nel 2011. Questo manipolatore è dotato di attuatori a memoria di forma e giunti flessibili per facilitarne la miniaturizzazione e per avere bassi costi e facilità di impiego.
|
|
|
Video del BAPAMAN (Binary Parallel Manipulator)
Questa video mostra un prototipo di manipolatore parallelo modulare ad attuazione binaria denominato BAPAMAN che è stato progettato presso il LARM in collaborazione con l’istituto IWF di Braunschweig Germania nel 2011. Questo manipolatore è dotato di attuatori a memoria di forma e giunti flessibili per facilitarne la miniaturizzazione e per avere bassi costi e facilità di impiego.
|

|
Foto del BAPAMAN 2 (Binary Parallel Manipulator versione 2)
Questa foto mostra un prototipo di manipolatore parallelo modulare ad attuazione binaria denominato BAPAMAN2 che è stato progettato presso il LARM in collaborazione con l’istituto IWF di Braunschweig Germania nel 2012. Questo manipolatore è dotato di attuatori a memoria di forma e giunti flessibili per facilitarne la miniaturizzazione e per avere bassi costi e facilità di impiego. Rispetto al BAPAMAN 1 si è ottenuta una riduzione della dimensione complessiva di circa il 50% ed un consistente incremento di rigidezza e accuratezza.
|

|
Video del BAPAMAN 2 (Binary Parallel Manipulator versione 2)
Questo video mostra un prototipo di manipolatore parallelo modulare ad attuazione binaria denominato BAPAMAN2 che è stato progettato presso il LARM in collaborazione con l’istituto IWF di Braunschweig Germania nel 2012. Questo manipolatore è dotato di attuatori a memoria di forma e giunti flessibili per facilitarne la miniaturizzazione e per avere bassi costi e facilità di impiego. Rispetto al BAPAMAN 1 si è ottenuta una riduzione della dimensione complessiva di circa il 50% ed un consistente incremento di rigidezza e accuratezza.
|

|
Milli-CaTraSys (Milli-Cassino Tracking System)
Questa foto mostra il sistema di misura denominato Milli-CaTraSys (Milli-Cassino Tracking System) che è stato sviluppato e realizzato presso il LARM di Cassino. Questo sistema di misura è in grado di misurare piccoli spazi di lavoro di sistemi robotici con elevata accuratezza. E’ possibile misurare sia posizione che orientazione. E’, inoltre, possibile applicare un carico noto. Questo consente di individuare eventuali spostamenti di cedevolezza.
|

|
Milli-CaTraSys (Milli-Cassino Tracking System)
Questo video mostra il sistema di misura denominato Milli-CaTraSys (Milli-Cassino Tracking System) che è stato sviluppato e realizzato presso il LARM di Cassino. Questo sistema di misura è in grado di misurare piccoli spazi di lavoro di sistemi robotici con elevata accuratezza. E’ possibile misurare sia posizione che orientazione. E’, inoltre, possibile applicare un carico noto. Questo consente di individuare eventuali spostamenti di cedevolezza.
|

|
LARM Two-Fingers Microgripper
Questa foto mostra il sistema di misura denominato LARM Two-Fingers Microgripper che è stato sviluppato e realizzato in una collaborazione tra LARM di Cassino e l’IWF di Braunschweig. Questo sistema di presa è in grado di afferrare oggetti di dimensioni inferiori ad 1 millimetro. Sono stati utilizzati giunti flessibili ed attuatori a memoria di forma per realizzare un sistema di basso costo e semplice impiego.
|

|
LARM Two-Fingers Microgripper
Questo video mostra il sistema di misura denominato LARM Two-Fingers Microgripper che è stato sviluppato e realizzato in una collaborazione tra LARM di Cassino e l’IWF di Braunschweig. Questo sistema di presa è in grado di afferrare oggetti di dimensioni inferiori ad 1 millimetro. Sono stati utilizzati giunti flessibili ed attuatori a memoria di forma per realizzare un sistema di basso costo e semplice impiego.
|

|
LARM Hand III test di presa stabile
Il video realizzato il 3 Novembre 2006 mostra il funzionamento con presa stabile durante movimento in una esperienza del prototipo di LARM hand sviluppato presso il LARM Laboratorio di Robotica e Meccatronica di Cassino sin dall’anno 1999. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|
|
|
LARM HAND III test presa stabile
La foto realizzata il 3 Novembre 2006 mostra il funzionamento con presa stabile durante movimento in una esperienza del prototipo di LARM hand sviluppato presso il LARM Laboratorio di Robotica e Meccatronica di Cassino sin dall’anno 1999. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
Simulatione del movimento di un dito della LARM Hand
In questa simulazione è possibile vedere il movimento di un dito della LARM Hand. Lo scopo della simulazione è verificare il comportamente del meccanismo di trasmissione del moto.
|

|
test di caratterizzazione del prototipo CAHYMAN di Giugno
Il video realizzato da Marco Ceccarelli nel giugno 2001 mostra il funzionamento in una esperienza del prototipo CAHYMAN (Cassino Hybrid Manipulator) sviluppato presso il LARM Laboratorio di Robotica e Meccatronica di Cassino sin dall’ anno 2000. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di esercitazione di studenti sulla presa con LARM Hand in 2008
Il video realizzato da Marco Ceccarelli nel 2008 mostra l’uso del prototipo di LARM Hand in una esperienza di esercitazione di studenti per il corso di Meccanica dei robot sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video mostra soluzioni di layout e programmazione relative alla sperimentazione con finalità didattiche per la stabilità di presa con LARM Hand.
|

|
video di esercitazione di studenti per muovere Cassino Exapod in 2008
Il video realizzato da Marco Ceccarelli nel 2008 mostra l’uso del prototipo di Cassino Exapod in una esperienza di esercitazione di studenti per il corso di Meccanica dei robot sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video mostra soluzioni di layout e programmazione relative alla sperimentazione con finalità didattiche per programmare il funzionamento delle gambe del Cassino Exapod.
|

|
video di esercitazione di studenti per impacchettamento di lampadine con robot in 2008
Il video realizzato da Marco Ceccarelli nel 2008 mostra l’uso di un robot industriale in una esperienza di esercitazione di studenti per il corso di Meccanica dei robot sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video mostra soluzioni di layout e programmazione relative alla sperimentazione con finalità didattiche per impacchettamento di lampadine con robot..
|

|
video di esercitazione di studenti per assemblare scatole di crema da barba con robot in 2006
Il video realizzato da Marco Ceccarelli nel 2005 mostra l’uso di un robot industriale in una esperienza di esercitazione di studenti per il corso di Meccanica dei robot sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video mostra soluzioni di layout e programmazione relative alla sperimentazione con finalità didattiche per assemblare scatole di crema da barba con robot.
|

|
video di esercitazione di studenti per giocare a scacchi con robot in 2008
Il video realizzato da Marco Ceccarelli nel 2008 mostra l’uso di un robot industriale in una esperienza di esercitazione di studenti per il corso di Meccanica dei robot sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video mostra soluzioni di layout e programmazione relative alla sperimentazione con finalità didattiche per giocare a scacchi con robot.
|

|
video di esercitazione di studenti per assemblaggio di macchinetta per il caffè con robot in 2003
Il video realizzato da Marco Ceccarelli nel 2003 mostra l’uso di un robot industriale in una esperienza di esercitazione di studenti per il corso di Meccanica dei robot sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video mostra soluzioni di layout e programmazione relative alla sperimentazione con finalità didattiche per assemblaggio di macchinetta per il caffè con robot.
|

|
video di esercitazione di studenti per mettere coperchi su scatole con robot in 2006
Il video realizzato da Marco Ceccarelli nel 2005 mostra l’uso di un robot industriale in una esperienza di esercitazione di studenti per il corso di Meccanica dei robot sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video mostra soluzioni di layout e programmazione relative alla sperimentazione con finalità didattiche per mettere coperchi su scatole con robot..
|

|
video di test su mobilità di una gamba in BAPAMAN2 presso il LARM nel Febbraio 2012
Il video realizzato da Giuseppe Carbone e Marco Ceccarelli nel 2012 mostra il funzionamento in una esperienza di mobilità di una gamba in BAPAMAN2 sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino nell’ anno 2012 in collaborazione con IWF Brauschweig. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di test su vincolo di mobilità di una gamba in BAPAMAN2 presso il LARM nel Febbraio 2012
Il video realizzato da Giuseppe Carbone e Marco Ceccarelli nel 2012 mostra il funzionamento in una esperienza per vincolo di mobilità di una gamba in BAPAMAN2 sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino nell’ anno 2012 in collaborazione con IWF del Politecnico di Braunschweig. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di test di movimentazione di un braccio attuato da vite senza fine presso il LARM nel Luglio 2004
Il video realizzato da Marco Ceccarelli nel 2004 mostra il test di movimentazione di di un braccio attuato da vite senza fine sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino nell’ anno 2004. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di test di mobilità di gamba per Cassino Hexapod in Febraio 2005
Il video realizzato da Marco Ceccarelli nel 2005 mostra il funzionamento in una esperienza di test di mobilità di gamba per Cassino Hexapod sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino nell’ anno 2005. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di vista laterale di test di mobilità di gamba per Cassino Hexapod in Febraio 2005
Il video realizzato da Marco Ceccarelli nel 2005 mostra il funzionamento in una esperienza di test di mobilità di gamba per Cassino Hexapod sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino nell’ anno 2005. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video LARM di Simulazione numerica laterale di dito esoscheletro riabilitativo in 2010
Il video realizzato nel LARM nel 2010 mostra il video di simulazione numerica laterale di dito esoscheletro riabilitativo LARM sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video LARM di Simulazione numerica laterale di dito LARM nel 2010
Il video realizzato nel LARM nel 2010 mostra il video di simulazione numerica laterale di dito LARM sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video LARM di Simulazione numerica frontale di dito esoscheletro riabilitativo in 2010
Il video realizzato nel LARM nel 2010 mostra il video di simulazione numerica frontale di dito esoscheletro riabilitativo LARM sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video LARM di Simulazione numerica frontale di dito LARM nel 2010
Il video realizzato nel LARM nel 2010 mostra il video di simulazione numerica frontale di dito LARM sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video LARM di Simulazione numerica di LARM hand IV nel 2010
Il video realizzato nel LARM nel 2010 mostra il video di simulazione numerica di ARM hand IV sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video LARM di Simulazione numerica di dito LARM nel 2010
Il video realizzato nel LARM nel 2010 mostra il video di simulazione numerica di di dito LARM sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di un test di presa di un cilindro di legno con LARM hand III nel Dicembre 2006
Il video realizzato nel 2006 mostra il funzionamento in una esperienza di un test di presa di un cilindro di legno con LARM hand III sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di un test di presa di un palloncino di farina con LARM hand III nel Dicembre 2006
Il video realizzato nel 2006 mostra il funzionamento in una esperienza di un test di presa di un palloncino di farina con LARM hand III sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di un test di presa di un palloncino di farina con LARM hand III nel novembre 2006
Il video realizzato nel 2006 mostra il funzionamento in una esperienza di un test dinamico di presa di un palloncino di farina con LARM hand III sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video LARM di Simulazione numerica di Cassino Hexapode su grande vuoto nel 2009
Il video realizzato nel LARM nel 2009 mostra il video di simulazione numerica di di Cassino Hexapode su grande vuoto sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di un test di movimento di una gamba di Cassino Hexapode nel 2008
Il video realizzato nel 2008 mostra il funzionamento in una esperienza di un test di movimento di una gamba di Cassino Hexapode sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di test di foratura con CAPAMAN2BIS su ADEPT nell’’Ottobre 2003
Il video realizzato nel 2003 mostra il funzionamento in una esperienza di test di foratura con CAPAMAN2BIS su ADEPT sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino nell’ anno 2003. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di test di mobilità di CAPAMAN2BIS nell’’Ottobre 2003
Il video realizzato nel 2003 mostra il funzionamento in una esperienza di test di mobilità di CAPAMAN2BIS sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino nell’ anno 2003. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di test di mobilità di CAPAMAN2BIS con tool per foratura nell’Ottobre 2003
Il video realizzato nel 2003 mostra il funzionamento in una esperienza di test di mobilità di CAPAMAN2BIS con tool per foratura sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino nell’ anno 2003. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video LARM di simulazione numerica di un serial-parallel manipulator nel 2001
Il video realizzato nel LARM nel 2001 mostra il video di simulazione numerica di un serial-parallel manipulator sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di un test di presa di un serial-parallel manipulator nel 2001
Il video realizzato nel 2001 mostra il funzionamento in una esperienza di un serial-parallel manipulator sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di un test di presa di un cilindro di teflon con dito LARM nel 2003
Il video realizzato nel 2003 mostra il funzionamento in una esperienza di un test di presa di un cilindro di teflon con dito LARM sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di un test di presa di un cilindro di teflon con dito LARM nel 2003
Il video realizzato nel 2003 mostra il funzionamento in una esperienza di un test di presa di una palla da tennis con dito LARM sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di un test di presa di un cilindro di legno con dito LARM nel 2003
Il video realizzato nel 2003 mostra il funzionamento in una esperienza di un test di presa di un cilindro di legno con dito LARM sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di un test di presa di movimento con dito LARM nel 2003
Il video realizzato nel 2003 mostra il funzionamento in una esperienza di un test di movimento con dito LARM sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
secondo video LARM di Simulazione numerica di sistema per stampa di restauro su volta 2009
Il secondo video realizzato nel LARM nel 2009 mostra il video di simulazione numerica di sistema per stampa di restauro su volta sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video LARM di Simulazione numerica di sistema per stampa di restauro 2009
Il video realizzato nel LARM nel 2009 mostra il video di simulazione numerica di sistema per stampa di restauro sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video LARM di Simulazione numerica di sistema per stampa di restauro su muro 2009
Il video realizzato nel LARM nel 2009 mostra il video di simulazione numerica di sistema per stampa di restauro su muro sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video LARM di Simulazione numerica di sistema per stampa di restauro su volta 2009
Il video realizzato nel LARM nel 2009 mostra il video di simulazione numerica di sistema per stampa di restauro su volta sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video LARM di Simulazione numerica di area di lavoro braccio scavatore nel 2011
Il video realizzato nel LARM nel 2011 mostra il video di simulazione numerica di area di lavoro braccio scavatore sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video LARM di Simulazione numerica di manipolazione di braccio scavatore con carico nel 2011
Il video realizzato nel LARM nel 2011 mostra il video di simulazione numerica di manipolazione di braccio scavatore con carico sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video LARM di Simulazione numerica di scavo con braccio scavatore nel 2011
Il video realizzato nel LARM nel 2011 mostra il video di simulazione numerica di scavo con braccio scavatore sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di un test con CAPAMAN per l’effetto di un terremoto sull’azione di presa della LARM hand nel febbraio 2011
Il video realizzato nel 2011 mostra il funzionamento in una esperienza di un test con CAPAMAN per l’effetto di un terremoto sull’azione di presa della LARM hand sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di un test con CAPAMAN per l’effetto di un terremoto sul moto lento di un manovellismo nel febbraio 2011
Il video realizzato nel 2011 mostra il funzionamento in una esperienza di un test con CAPAMAN per l’effetto di un terremoto sul moto lento di un manovellismo sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di un test con CAPAMAN per l’effetto di un terremoto sul moto verticale lento di un manovellismo con carico pesante nel febbraio 2011
Il video realizzato nel 2011 mostra il funzionamento in una esperienza di un test con CAPAMAN per l’effetto di un terremoto sul moto verticale lento di un manovellismo con carico pesante sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di un test con CAPAMAN per l’effetto di un terremoto sul moto verticale veloce di un manovellismo nel febbraio 2011
Il video realizzato nel 2011 mostra il funzionamento in una esperienza di un test con CAPAMAN per l’effetto di un terremoto sul moto verticale veloce di un manovellismo sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di un test di movimentazione lenta della mobilità di CAPAMAN nel febbraio 2011
Il video realizzato nel 2011 mostra il funzionamento in una esperienza di un test di movimentazione lenta della mobilità di CAPAMAN sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di simulazione numerica LARM di moto di estensione del modello di tronco nel 2009
Il video realizzato nel LARM nel 2009 mostra il video di simulazione numerica di moto di estensione del modello di tronco umano sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di simulazione numerica LARM di moto di flession del modello di tronco nel 2009
Il video realizzato nel LARM nel 2009 mostra il video di simulazione numerica di moto di flessione del modello di tronco umano sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di simulazione numerica LARM di moto rotatorio del modello di tronco nel 2009
Il video realizzato nel LARM nel 2009 mostra il video di simulazione numerica di moto rotatorio del modello di tronco umano sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video laterale di simulazione numerica di superamento ostacolo di Cassino Rickshaw nel 2012
Il video realizzato nel LARM nel 2012 mostra il video laterale di simulazione numerica di superamento ostacolo di Cassino Rickshaw sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di simulazione numerica di cambio direzione di Cassino Rickshaw nel 2012
Il video realizzato nel LARM nel 2012 mostra il video di simulazione numerica di cambio direzione di Cassino Rickshaw sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di simulazione numerica di superamento ostacolo di Cassino Rickshaw nel 2012
Il video realizzato nel LARM nel 2012 mostra il video di simulazione numerica di superamento ostacolo di Cassino Rickshaw sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di simulazione numerica di moto di gamba di Cassino Hexapod nel 2012
Il video realizzato nel 2012 mostra il video di simulazione numerica di movimentazione di una gamba di Cassino Hexapod sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di simulazione numerica di passo a gait tripode di Cassino Hexapod nel 2012
Il video realizzato nel 2012 mostra il video di simulazione numerica di passo a gait tripode di Cassino Hexapod sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di simulazione numerica di superamento ostacolo di Cassino Hexapod nel 2012
Il video realizzato nel 2012 mostra il video di simulazione numerica di superamento ostacolo di Cassino Hexapod sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video di simulazione numerica affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di impacchettamento robotizzato di prodotti ortofrutticoli presso il LARM nel Maggio 2007
Il video realizzato nel 2007 mostra il funzionamento in una esperienza di impacchettamento robotizzato di prodotti ortofrutticoli sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino nell’ anno 2007. Il video affronta problematiche e soluzioni relative alla sperimentazione con finalità didattiche ma anche progettuali.
|

|
video di esercitazione di studenti del corso di Meccanica dei Robot per posizionamento cubi di legno nel 2013
Il video realizzato nel 2013 mostra l’uso del robot Adept in una esperienza di esercitazione di studenti per il corso di Meccanica dei robot sviluppata presso il LARM Laboratorio di Robotica e Meccatronica di Cassino. Il video mostra la movimentazione di cubi di legno per la scrittura di parole.
|







 Ansicht vergrößern
Ansicht vergrößern