 Open document
Open document
|
General information |
| Author |
Petuya Arcocha, Victor |
| Published |
Universidad del País Vasco, Bilbao, 2002
|
| Edition |
|
| Extend |
|
| ISBN |
|
| Abstract |
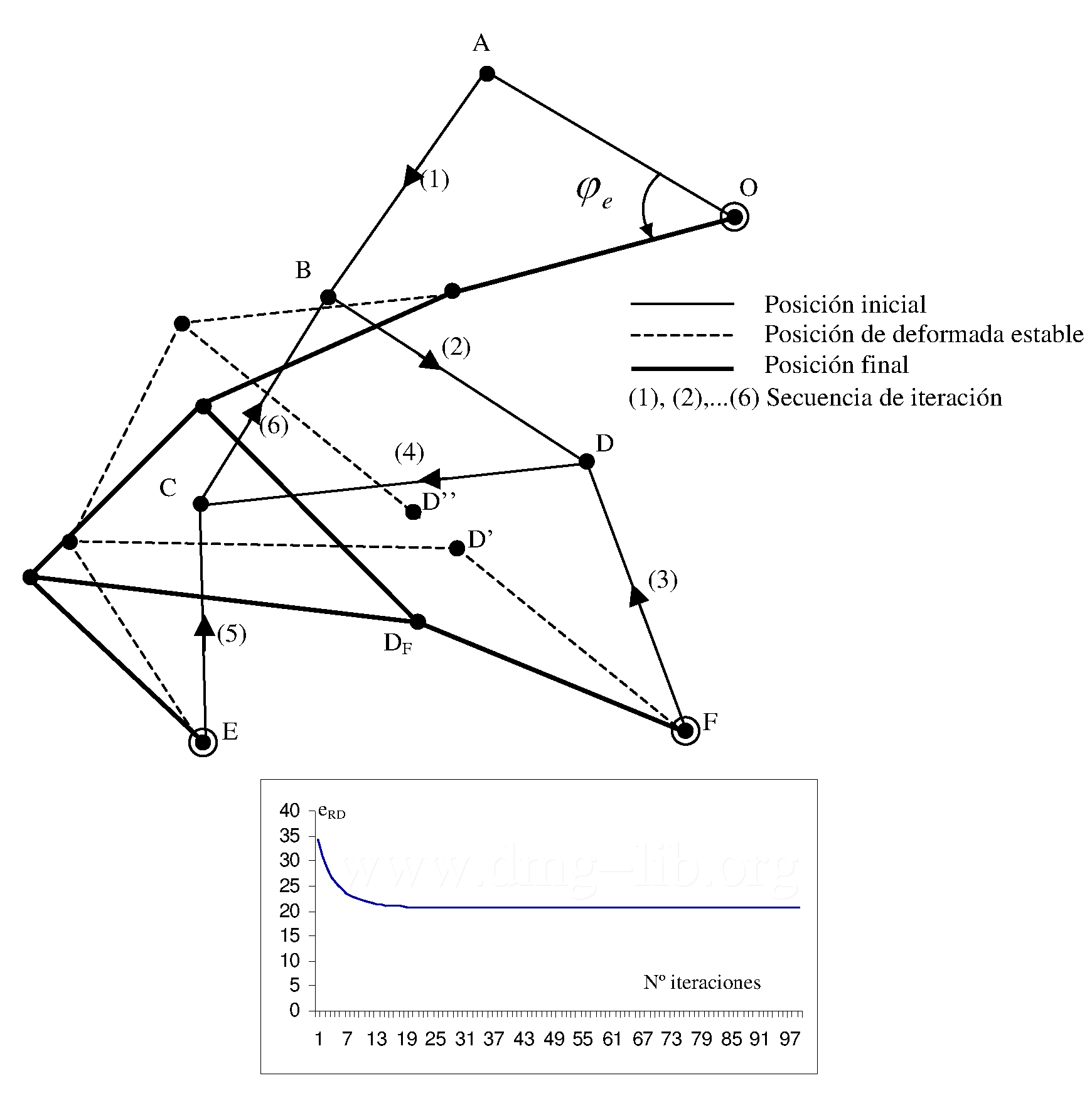
"Método geométrico-iterativo para la resolución del problema de posición directo en mecanismos planos con pares inferiores. Análisis de posiciones singulares"
"Método geométrico-iterativo para la resolución del problema de posición directo en mecanismos planos con pares inferiores. Análisis de posiciones singulares". Universidad del País Vasco, Bilbao, Tesis doctoral (Ph.D. thesis). (2002). |
|
























































